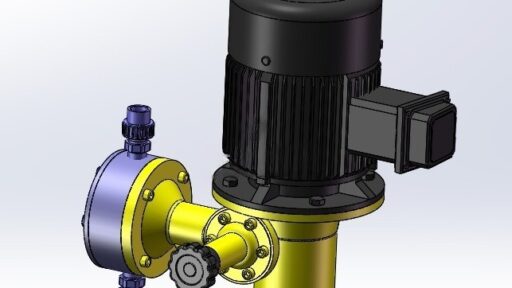
流量范围:0-500 L/H 压力范围: 0-1.0 MPA 电机功率: 370W,220V / 380V / 420V / 110V, 50/60Hz 驱动系统: 两相、三相电机或防爆电机 防护等级: IP55 流量控制:手动控制, 自动控制(接收4-20mA 信号)
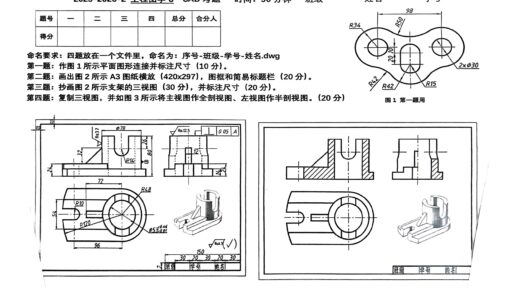
工程图学C CAD考题时间:90分钟 命名要求:四题放在一个文件里,命名为:序号-班级-学号-姓名.dwg 第一题:作图1所示平面图形连接并标注尺寸(10分)。 第二题:画出图2所示A3图纸横放(420x297),图框和简易标题栏(20分)。 第三题:抄画图2所示支架的三视图(30分),并标注尺寸(20分)。 第四题:复制三视图,并如图3所示将主视图作全剖视图、左视图作半剖视图。(20分) SW文件截图 CAD图纸 文件列表 下载地址 支付 30.00 元,获取全部资料

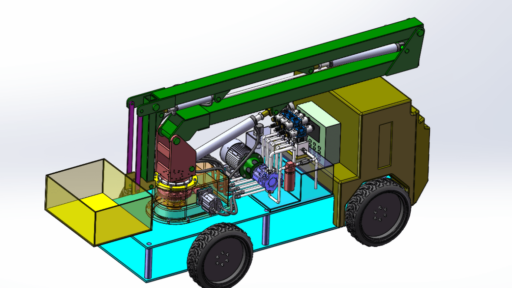
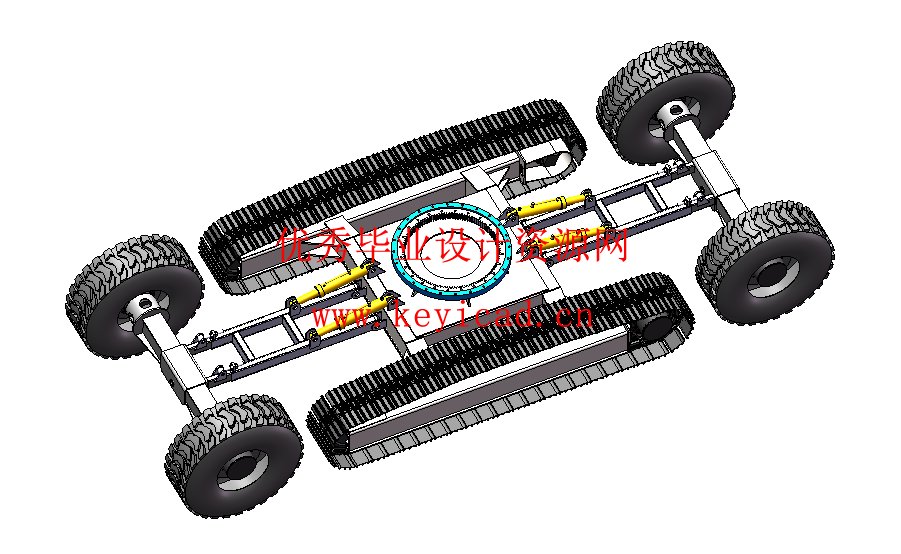
摘要 目前,高空作业车普遍用于各种生产和生活中,广泛用于电力、路灯、市政、园林、通信、机场、造(修)船、交通、广告、摄影等高空作业领域。因为它的功能的普遍性使得运用越来越广泛,同时,相应的设计研发水平不断地提升,使得高空作业车越来越智能化,不断地满足各种需要。本文介绍的是一种高空作业车及其液压系统的设计。通过液压传动控制,液压泵站控制液压缸伸缩来实现大臂俯仰、小臂俯仰、舱室俯仰和底座旋转的动作,进而满足不同高度和方位的工作位置,通过对液压控制的整机结构设计、受力分析、液压系统设计分析及计算、校核、选型等。最终实现所…
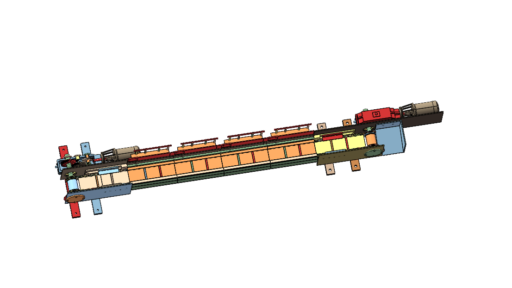
摘要 水平刮板输送机是一种在煤矿业运输的机械装备,是一种能够配合综采设备这一整体的子装备。刮板运输机的工作主要是用于运送、转运工作面采煤机已经采取完成的煤炭的运输工作,并且能够连接整套的采煤装配的连接,提高采煤的整体效率。刮板输送机的设计主要包含了机械的运动转换、速度调节、动力传送、铸造件的结构设计等机械设计和制造工艺的相关内容的知识。本刮板输送机可与大型的采煤机配套使用,例如与MG300/700-WD型号的采煤机配套使用,其优点主要是运输量较大,寿命较长,工作可靠,工作效率高等,是大型综采配套设备不可或缺的优秀机…
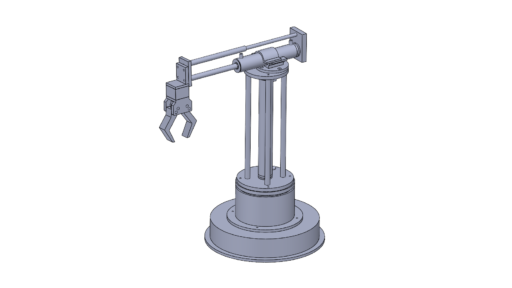
摘要 本文全面探讨了三自由度自动送料机械手的设计与实现。文章首先概述了气动机械手的设计要求和基本方案,深入分析了各种驱动方式的利弊,并最终选择了气压驱动作为核心设计。接下来,文章详细描述了机械手关键部件的设计,涵盖夹持器、升降、水平移动及底座回转等机构,同时兼顾了机械手的定位精度和运动平稳性。在气动驱动系统部分,文章详细讲解了手部抓取缸、升降气动回路以及小臂伸缩缸气动回路的设计。此外,文章还聚焦于机械手的控制系统设计,选用可编程控制器(PLC)作为主控单元,以确保机械手的精准操控。总体而言,该研究为三自由度自动送料…
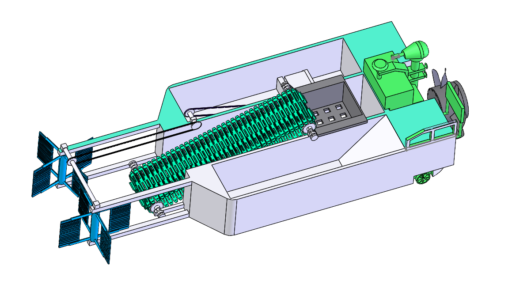
摘要 现下日趋严重的污染的形势下为解决一般水域与道路废弃物以及垃圾的处理难题,研制了一台水陆两栖垃圾清理机。为减轻垃圾清除设备的负担,我们采用了垃圾清除设备的上下两个部分的设计方式,该设备使用电瓶作为电源,并且配备有直流电动机和马达来驱使其运转。清洁设备的前部是用电动机推动的,它可以控制机器的移动和旋转。当电力经由减速器减少速度后,动力被传递给 V 型皮带,进而让中间运输链条和链轮获得了动力以产生旋转。在前方,运输链负责将垃圾从水面上移至垃圾储藏箱内。若此存储箱已满,可以通过人力将其倾倒进清洁设备里。另外,链轮则是…
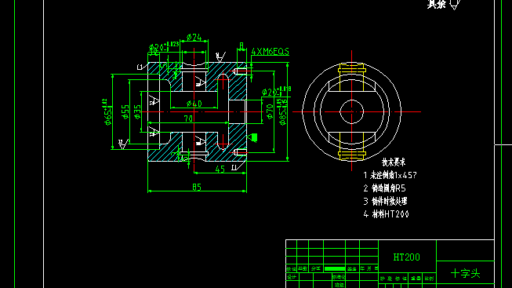
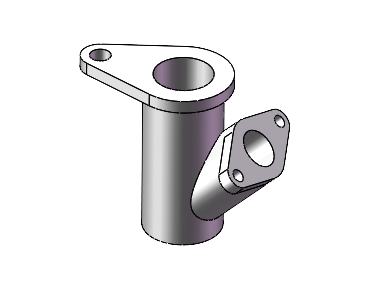
摘要 本设计是基于十字头零件的加工工艺规程及一些工序的专用夹具设计。十字头零件的主要加工表面是外圆及孔系。一般来说,保证平面的加工精度要比保证孔系的加工精度容易。因此,本设计遵循先面后孔的原则。并将孔与平面的加工明确划分成粗加工和精加工阶段以保证孔系加工精度。主要加工工序安排是先以φ20孔系定位加工出顶平面,在后续工序中除个别工序外均用顶平面和工艺孔定位加工其他孔系与平面。夹具选用专用夹具,夹紧方式多选用手动夹紧,夹紧可靠,机构可以不必自锁。因此生产效率较高。适用于大批量、流水线上加工。能够满足设计要求。 关键词:…


