任务书 开题报告 文件列表 下载地址 支付 30.00 元,获取全部资料

研究目的及意义 随着人类的经济发展和人们的思想不断更新,人们越来越多关注自己的身体状况,“养生”“保健”等词语越来越多的出现在大家的口中,同时,当前科技发展的大背景下为发展智能领域提供了必要前提,可移动操作、简单便捷、低功耗、准确可靠等优点的心率血氧检测设备就是非常必要的。传统的血氧心率检测设备的使用场景较为单一、使用方式也颇有限制,使得部分人群如极限运动爱好者、高强度作业的工人、部分打鼾人群、长期熬夜加班的人群无法在运动、工作或睡眠中无障碍实时监测心率、血氧饱和度等生理参数,在危险来临之前无法及时预…
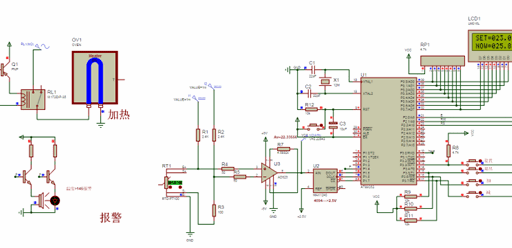
摘要 烤箱是工业生产和日常生活中都会用到的设备,其最主要的工作性能参数就是温度,温度控制是工业生产过程中经常遇到的过程控制,有些工艺过程对其温度的控制效果直接影响着产品的质量,因而设计一种较为理想的温度控制系统是具有不一般的价值与意义。在现代化的工业生产中,电流、电压、温度、压力、流量、流速和开关量都是常用的主要被控参数。例如:在治金工业、化工生产、电力工程、造纸行业、机械制造和食品加工等诸多领域中,人们都需要对各类加热炉、热处理炉、反应炉和锅炉中的温度进行检测和控制。采用单片机来对温度进行控制,不仅具有控制方便、…
文末参考选题 同学们,毕业设计的大关即将来临,是否还在为选题而焦头烂额?别怕,今天我们就来一场“快闪”行动,教你如何在短短5分钟内,精准拿捏单片机毕业设计的完美选题!🔥 在这个信息爆炸的时代,选择比努力更重要。一个好的选题,不仅能让你的毕业设计之旅顺畅无阻,更能成为你学术生涯中的闪亮名片。💡 但面对琳琅满目的可能性,怎样才能快速找到那个既符合兴趣又具有创新点的方向呢 别急,接下来的几分钟,我们将携手踏上一场高效选题之旅,让你的毕业设计从“选择困难症”直接飞跃到“胸有成竹”!🚀 准备好了吗?让我们一起,用智慧和效率,…
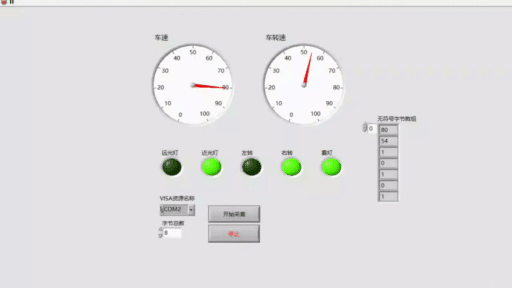
摘要 汽车仪表是连接驾驶者和汽车的重要交互界面,为驾驶员提供了实时的运行参数、故障、里程等信息,扮演着不可或缺的角色。本文提出了基于串口屏的汽车仪表设计方案,采用STC89C52单片机作为控制器,通过传感器信号和继电器信号的采集,实现了在串口屏幕上显示车辆行驶过程中相关的实时信息,以及系统的自动控制和精确控制。首先,文章介绍了单片机的基本原理,详细阐述了涉及到单片机、串口屏幕、传感器等元器件的设计流程和工作原理,并且论述了速度检测的原理,最后,通过对软硬件的多次反复调试,完成了设计最初的目的,也就是实现了在串口屏幕…
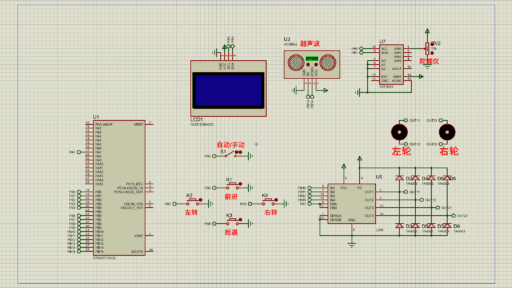
摘要 近年来,随着智能机器人技术的快速发展,两轮自平衡机器人凭借其灵活的运动性能和广阔的应用前景(如服务巡检、教育娱乐等领域),逐渐成为研究热点。这类机器人需通过动态平衡控制实现自主运动,其核心挑战在于融合多传感器数据、设计高效控制算法及优化系统能效。现有研究多聚焦于控制策略改进,但在低成本嵌入式平台部署、传感器噪声抑制及能源效率优化等方面仍存在不足。针对上述问题,本文以STM32微控制器为核心,开展两轮自平衡机器人的系统设计与优化研究。本文首先构建机器人硬件框架,选用STM32F4系列芯片作为主控单元,集成MPU…
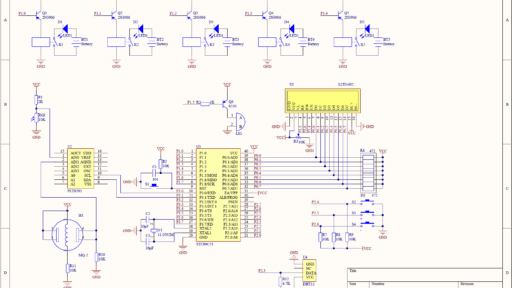
摘要 随着科技的飞速发展,智能家居系统逐渐成为现代家庭的重要组成部分,而单片机作为智能家居系统的核心控制器,发挥着举足轻重的作用。在此背景下,本文设计了一种基于单片机控制的智能家居控制系统,旨在提供更加智能、便捷和舒适的家居环境。本研究采用51/52单片机作为主控芯片,当环境温湿度超过用户设定的阀值时,系统会触发蜂鸣器闪烁报警,提醒用户注意。若温度或湿度超限,报警信号灯会点亮,并驱动相应的继电器吸合,进而控制通风机、抽湿机、加热器、制冷器、加湿器和报警器等外部设备的开启或关闭。烟雾传感器如监测到有烟雾,则会自动发起…
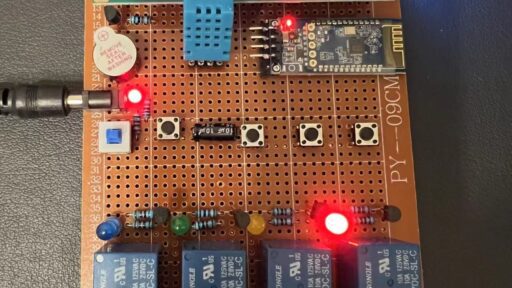
摘要 随着科技的飞速发展,智能家居系统逐渐成为现代家庭的重要组成部分,而单片机作为智能家居系统的核心控制器,发挥着举足轻重的作用。在此背景下,本文设计了一种基于单片机的智能家居环境监测报警系统,旨在提供更加智能、便捷和舒适的家居环境。本研究采用51单片机作为主控芯片,当环境温湿度超过用户设定的阀值时,系统会触发蜂鸣器闪烁报警,提醒用户注意。若温度或湿度超限,报警信号灯会点亮,并驱动相应的继电器吸合,进而控制通风机、抽湿机、加热器、制冷器、加湿器和报警器等外部设备的开启或关闭。本系统还引入了手机APP控制功能,用户可…
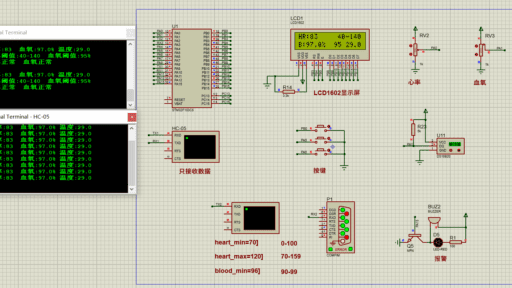
摘要 随着人们对健康和健身的日益关注,智能健身设备成为了现代生活中的重要组成部分。传统的健身设备在功能和使用体验上已难以满足现代人对于健康管理的多元化需求。在此背景下,基于STM32的智能健身设备设计应运而生。STM32作为高性能、低功耗的微控制器,具有强大的数据处理能力和灵活的扩展性,为智能健身设备的创新设计提供了强有力的技术支持。通过集成多种生理参数监测功能,如心率、体温和血氧等,智能健身设备能够为用户提供更为全面、精确的健康数据,从而帮助用户实现个性化的健身管理和健康评估。本文主要聚焦于基于STM32的智能健…
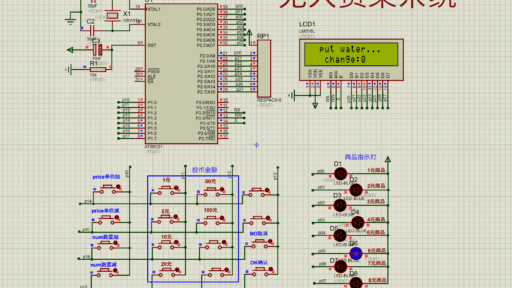
摘要 随着物联网技术的快速发展,无人货架系统因其便捷性和智能化特点逐渐受到广泛关注。传统的货架管理需要人工巡检,效率低下且成本高昂,而基于单片机的无人货架系统则能有效解决这些问题。单片机以其体积小、功耗低、集成度高等优点,成为构建无人货架系统的理想选择。因此,研究和设计基于单片机的无人货架系统具有重要的现实意义和应用价值。本文主要研究了基于单片机的无人货架系统的设计与实现。首先,对无人货架系统的整体架构进行了设计,包括货架结构、传感器模块、单片机控制模块等关键部分。其次,详细阐述了单片机在系统中的应用,包括数据采集…


