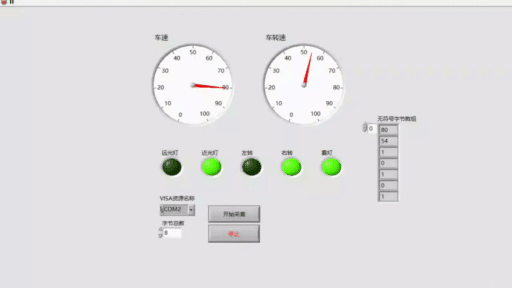
摘要 汽车仪表是连接驾驶者和汽车的重要交互界面,为驾驶员提供了实时的运行参数、故障、里程等信息,扮演着不可或缺的角色。本文提出了基于串口屏的汽车仪表设计方案,采用STC89C52单片机作为控制器,通过传感器信号和继电器信号的采集,实现了在串口屏幕上显示车辆行驶过程中相关的实时信息,以及系统的自动控制和精确控制。首先,文章介绍了单片机的基本原理,详细阐述了涉及到单片机、串口屏幕、传感器等元器件的设计流程和工作原理,并且论述了速度检测的原理,最后,通过对软硬件的多次反复调试,完成了设计最初的目的,也就是实现了在串口屏幕…
摘要 二十一世纪以来,我国的食品行业的发展大大改革在加工食品的早期开放的日益提高,人们的生活和高要求的食品包装食品机械的食品工业的发展,提高人民的物质生活不断为了满足食品行业促进各类食品机械和食品机械的发展,机器的自动化和加工食品中的社会发展必然的一种先进的发展需求促进社会主义经济建设的不断发展,人们的物质生活旁边的新要求,食品的质量,为水果量的变化来满足人们的日常需求,和小食品包装市场供应系统方便法就提到了议事日程,,其优势是用来节省时间,提高效率,为大规模生产劳动释放保证效处理的实现是否手工制作,产品质量,降低…
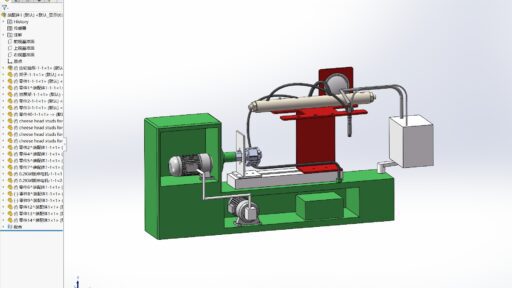
摘要 电控高压共轨式燃油喷射系统是现代柴油机燃油系统的发展方向,为了研究其可靠性,本研究给出了一个高压共轨系统可靠性测试平台的设计方案。该平台还可以和部件性能试验平台相结合,进行部件的可靠性测试。在保证其他部件可靠的前提下,被测部件先在该平台上进行长时间运行,然后再转到部件性能试验台上进行性能测试从而判断其可靠性. 根据系统部件的常见故障来设定系统的可靠性判据。被测的高压共轨系统由高压油泵、高压油管、共轨管、喷油器组成。燃油进入高压油泵,经泵压缩后由高压油管进入共轨管,最后从喷油器喷出。高压油泵的常见故障有密封不良…
摘要 高速列车一般指时速在200公里以上的列车。20世纪50年代初,法兰西共和国首先提出了高速列车的设想,并最早开始试验工作。1976年,用柴油电动机车牵引的高速列车在英国投入服务,这是当时英国最快的载客列车,最高时速达250公里。法兰西共和国则以电力机车为研究对象,其高速电力引列车在1978年曾创下时速260公里的纪录。1981年10月,新的高速列车“T.G.V”在巴黎─里昂干线正式投入使用。采用流线形造型的“T.G.V”和和常规列车相比,空气阻力减小了三分之一。它装有大功率动力装置,具有较强的爬坡能力,可以高速…
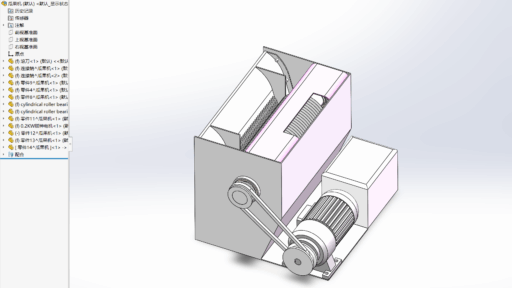
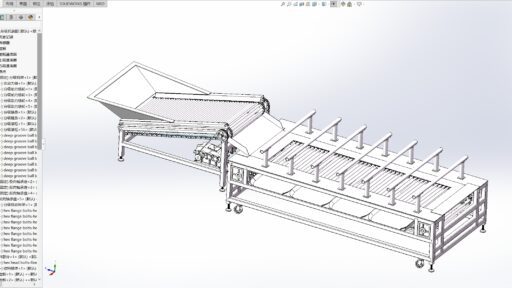
摘要 本文设计了一种集清洗与切块功能于一体的番石榴清洗切块机,旨在解决番石榴果实加工中的清洗不彻底、切块不均匀及卫生安全隐患等问题。通过市场调研和技术分析,明确了设备设计要求,并采用了自动上料、高效清洗、精准切块及模块化设计等创新技术。设备利用高压喷淋系统实现全面清洗,通过电机、减速器、凸轮和切刀的精确配合实现均匀切块,同时采用SolidWorks进行三维建模,直观展示设备结构和工作原理。该设备不仅适用于番石榴加工,还具有推广到其他水果加工领域的潜力,显著提高了加工效率和产品质量,为农业机械化、智能化发展做出了积极…
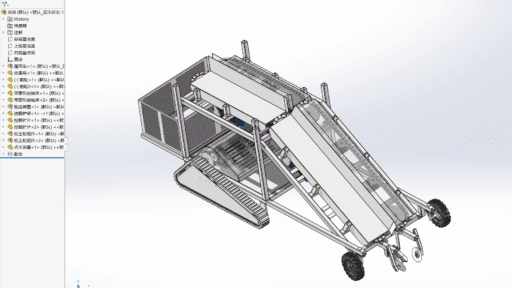
摘要 本文旨在设计一种高效、实用的大葱收获机,以解决当前大葱收获过程中存在的人工劳动强度大、效率低下等问题。文章首先介绍了课题的背景及意义,指出随着农业现代化的推进,大葱种植业的机械化需求日益迫切。随后,通过对国内外大葱收获机械的研究现状进行分析,明确了本课题的研究方向和创新点。在设计过程中,首先根据大葱的物理特性和农艺要求,提出了总体设计方案。该方案包括传动路线、驱动装置选型、链条选型与计算、松土轮设计以及挖掘铲设计等关键部分。其中,传动路线设计合理,确保了机器的稳定运行;驱动装置选型经过精确计算,满足了机器的功…

一、参考文献格式: 1 参考文献是对期刊论文引文进行统计和分析的重要信息源之一,在本规范中采用GB7714推荐的顺序编码制格式著录。 2 参考文献著录项目 a.主要责任者(专著作者、论文集主编、学位申报人、专利申请人、报告撰写人、期刊文章作者、析出文章作者)。多个责任者之间以“,”分隔,注意在本项数据中不得出现缩写点“.”。主要责任者只列姓名,其后不加“著”、“编”、“主编”、“合编”等责任说明。 b.文献题名及版本(初版省略)。 c.文献类型及载体类型标识。 d.出版项(出版地、出版者、出版年)。 e.文献出处或…
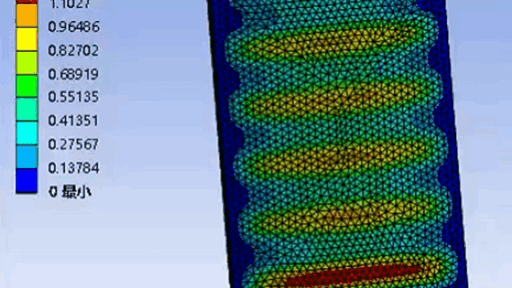
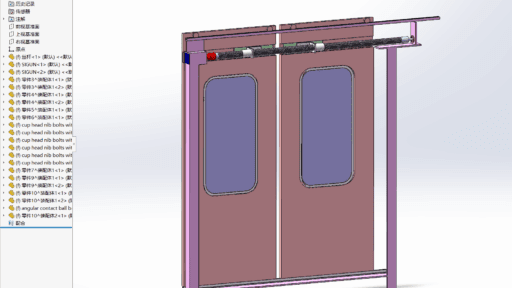
摘要 本文针对防爆门的结构优化设计进行了系统的研究。绪论部分首先阐述了课题的背景及意义,强调了防爆门在工业生产、军事设施等领域对于抵御爆炸冲击波、保护人员和设备安全的重要性。同时,对防爆门的结构形式及国内外研究现状进行了综述,为后续的研究工作提供了坚实的理论基础和实践参考。在爆炸现象概述部分,本文详细介绍了爆炸冲击波的形成和传播机制,以及爆炸冲击波超压的计算方法,为防爆门的载荷确定提供了有力的理论支持。基于此,进行了防爆门的模型建立及有限元分析,采用有限元单元法,利用ANSYS软件对防爆门进行了详细的建模和分析,包…
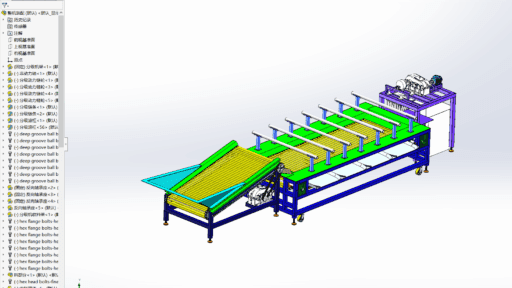
摘要 本文设计了一种苹果分选机,旨在满足农业现代化中对苹果高效、精准分选的需求。随着农业现代化推进,苹果分选机的自动化、智能化对于提升生产效率和降低劳动强度至关重要。文章首先综述了国内外苹果分选技术的研究现状,分析了当前技术的优缺点,为设计提供了参考。在设计环节,首先明确了设计参数、原则和总体方案。接着,详细设计了关键零部件,如上料机、分选机构和传动装置。上料机确保苹果稳定有序进入分选机构;分选机构能精准识别与分类苹果大小、颜色等特征;传动装置则通过详细计算总传动比、分配传动比以及运动和动力参数,确保分选机稳定运行…


