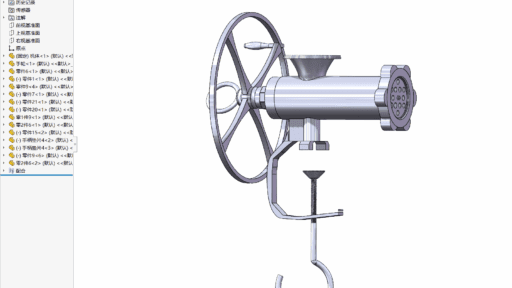
摘要 本设计针对传统手动绞肉机的效率低、操作费力及功能单一等问题,提出一种新型手动绞肉机方案。通过优化传动系统与核心零部件设计,采用两级齿轮减速机构(传动比4:1)与螺距递减式绞龙结构,结合6061铝合金机身框架,实现操作力矩降低30%(≤14N·m)、单次处理500g肉料效率提升至2分钟以内。刀具系统创新采用双层错位刀刃(刃角28°,硬度HRC56)与可调式挤压板(φ3/5/8mm梯度孔径),支持绞肉粒度误差±0.15mm,并兼容切丝、灌肠等6种功能模块。安全性方面,通过机械互锁装置、圆角化处理及模块化快拆设计,…
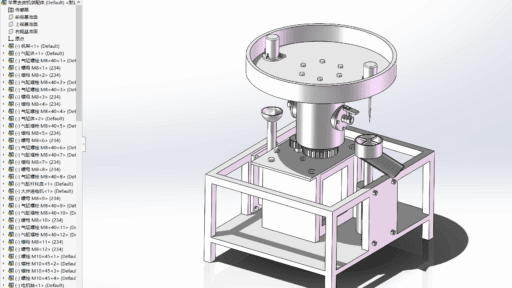
摘要 现阶段我国苹果的生产相对较好,但是在加工方面和西方国家相比就有相当大的差距,在加工自动化方面更是落后。我国现在水果罐头行业的发展相对比较乐观,并且消费者对水果罐头的需求越来越大。水果罐头需求大,当然少不了苹果罐头,但我国现有的苹果去皮设备中存在着不少问题,比如大型设备体积庞大,加工过程苹果容易受污染,且不适合小型企业加工,另外有一部分设备需要靠人工将苹果逐个插到固定针上,这样很容易造成工人受伤事故。本文设计的苹果自动去皮机主要适用于小型苹果罐头加工企业,不再需要人工将苹果逐个插到固定针上,而是采用自动检测系统…
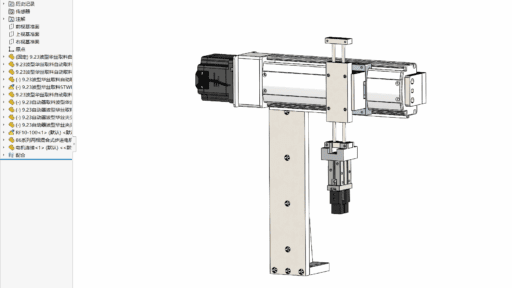
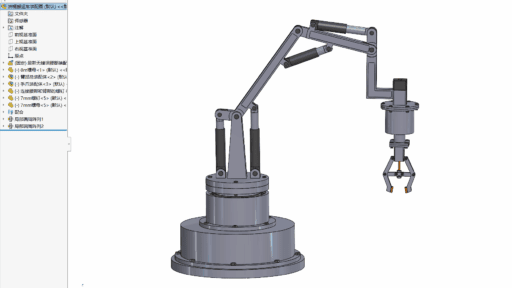
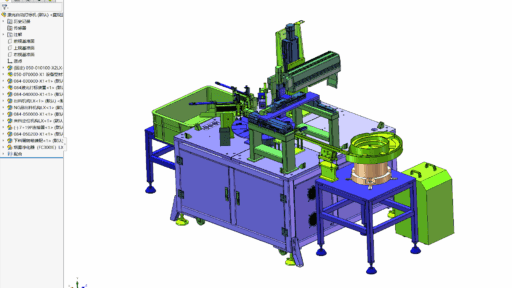
摘要 药品企业在升级改造以及上新产品线的过程中从经济上、技术上,卫生上考虑引入更多的自动化控制,胶囊抓取机械手面向药品企业,主要应用在胶囊或类似产品的包装环节中,它的性能影响整个包生产装的效率和质量。 首先结合生产线的工作要求确定机械臂的各项技术指标,为机械臂的结构设计提供依据,在参考多种机器人方案基础上,确定机械臂的总体方案为三自由度的机械臂,对机械臂的各部分结构进行设计选型,完成口胶囊抓取机械手各部件的 Solidworks 三维图的设计,并在软件中完成装配。并且对胶囊机械手的关键零部件,如伺服电机、同步齿形带…
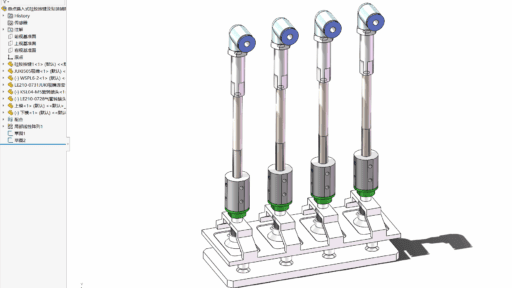
摘要 单点插入式硅胶按键通过结构力学重构实现了力传导路径的优化,其核心价值在于将传统面接触改进为精准点接触模式。这种设计不仅通过减少摩擦面积延缓硅胶老化,更利用三维立体支撑结构实现触感曲线的精确控制,使按键在百万次按压后仍能保持初始触感一致性。对于高端电子设备而言,这种技术突破将显著提升用户交互体验,延长产品使用寿命周期,尤其在汽车中控、智能家居等新兴领域,稳定的触控性能已成为产品高端化的重要指标。配套开发的贴装辅助插头则从制造维度重构了生产流程,其模块化定位系统通过物理限位与光电传感的融合,将传统目视校准升级为自…
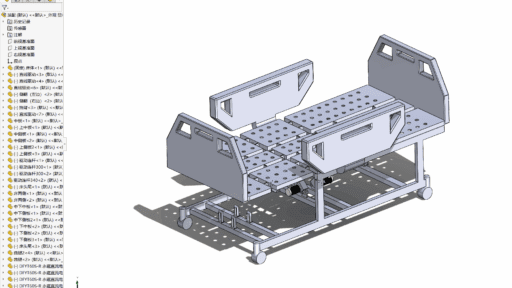
摘要 在享受人口红利的同时,人口老龄化的趋势逐年在上升,这直接导致卧床病人和行动不便的老年人数量也在上升。昂贵的护理费用,使得人们逐渐对医疗器械关注度越来越高,医用护理床得到了快速的发展,基于人体基本体位需求设计一款医用多功能护理,本文主要完成了一下几方面工作:(1)对国内外医用多功能护理床进行研究现状分析,总结了现存医用多功能护理床所存在问题,在次基础上提出了一种可以帮助老年人或者卧床病人进行 体位变化的进行医用多功能护理。(2)针对所研究的护理床提出了整体结构方案,同时对采用图解的方式,对抬背机构、曲腿机构、侧…
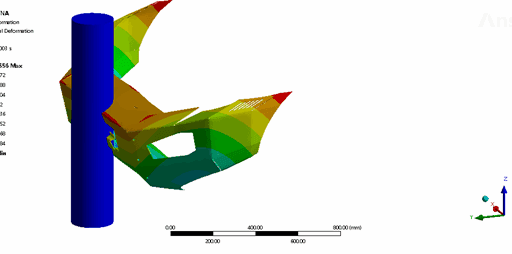
摘要 汽车保险杠作为车辆被动安全核心部件,其轻量化设计与碰撞性能优化对提升行车安全及降低维修成本具有重要意义。针对传统钢制保险杠吸能效率低(不足50%)、复合材料界面应力集中(系数达3.8)及仿真模型误差大(超20%)等问题,本研究提出基于多材料协同优化的保险杠设计方法。通过SolidWorks构建参数化三维模型,结合LS-DYNA显式动力学算法建立有限元碰撞模型,分析铝合金保险杠在60km/h碰撞下的动态响应,揭示其最大等效应力达12496MPa、变形量24.976mm的力学特性。 研究采用NSGA-II多目标优…
摘要 针对工业生产中油桶搬运效率低、安全隐患突出的问题,本研究设计了一种新型油桶搬运车机械结构,融合液压伺服定位与电机驱动技术,提出了一套完整的解决方案。通过系统论证与多学科交叉设计方法,构建了包含腰座回转机构、多自由度臂部结构、自适应末端执行器及复合传动系统的整体架构。腰座采用步进电机驱动的一级齿轮传动,传动比达1:120,配合双液压泵驱动的关节式臂部结构,实现了±1.5mm的定位精度与200kg级负载能力。创新设计了楔块杠杆式双模式末端执行器,集成压力传感器与PID闭环控制,可自适应直径400-650mm的油桶…
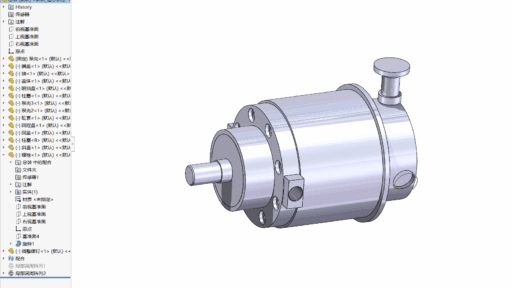
摘要 现代液压传动中,柱塞泵是使用最广的液压动力元件之一,其性能好坏是影响液压系统工作性能的关键。相对于日益提高的高压、大流量、高功率密度、高集成度、多样的控制形式等要求,我国的柱塞泵设计和制造已远远落后于世界先进水平。本论文在详细分析国内外轴向柱塞泵结构类型及其特点的基础上,设计了一种斜盘式轴向柱塞泵,结构紧凑合理、变量控制灵活多样、集成性好。完成斜盘式轴向柱塞泵总装图及主要零件图,并利用三维软件Pro/E进行三维建模,用UG完成指定零件加工仿真及数控编程。对今后进行轴向柱塞泵的研究和设计具有较高的参考价值。关键…
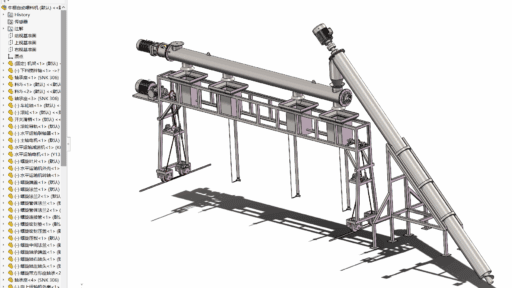
摘要 随着畜牧养殖业向规模化、集约化转型,传统人工喂养模式存在效率低、劳动强度大、饲料投喂不均等问题,制约了养殖效益提升。本文针对牛棚养殖场景,开展自动喂料机结构设计研究,旨在通过机械自动化技术实现精准投喂与高效管理。研究基于牛棚空间布局与饲料特性需求,融合螺旋输送技术、轨道行走控制及智能传感技术,完成设备总体方案规划与关键部件设计,结合三维建模与仿真分析优化结构性能,为畜牧机械化装备创新提供理论支持与实践参考。本文设计的牛棚自动喂料机采用龙门自走式结构,集成螺旋输送系统、翻转下料机构与智能控制系统。通过水平与垂直…
摘要 对于瓶盖激光打标机自动化生产线存在的问题,制定了一种新型的瓶盖激光打标机自动化系统,主要是针对瓶盖激光打标机的生产过程中这一套系统主要是由四部分组成:瓶盖输送机构机构标记机构,及其控制系统。采用震动盘与输送带相结合的,使瓶盖输送自动化技术输送;定位定位瓶盖,根据气缸驱动固定装置;根据扫描振镜系统进行快速、高精密打标打标组织,采用CO2激光发生器;自动控制系统系统软件机械自动化和基本参数,以PLC和触摸显示屏工业触摸屏为载体。系统还集成了视觉检测模块,可对打标质量进行实时监控。此系统通过实际测试,生产效率做到1…

