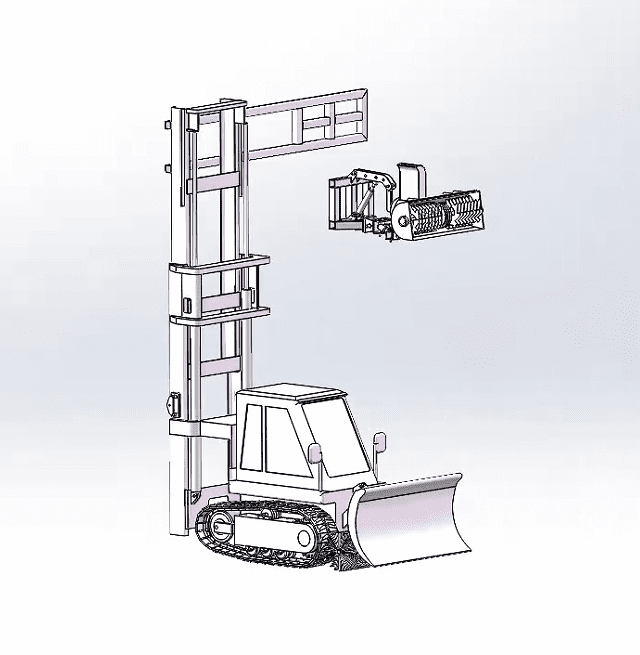
摘要 本文围绕温室大棚除雪机器人的设计展开研究。在绪论部分,首先介绍了课题的背景及意义,强调了温室大棚除雪对于保障农业生产的重要性,以及开发高效除雪机器人的必要性。接着,概述了除雪机器人在国内外的研究现状,为除雪机器人的设计提供了参考和借鉴。在总体方案设计阶段,明确了温室大棚除雪机器人的设计要求,包括适应性、高效性、稳定性等,并提出了具体的总体方案。关键零部件设计是本文的核心内容,详细阐述了动力源的计算方法、抛雪筒的结构设计方案、扫雪机绞龙的设计思路以及升降液压缸的计算校核过程。这些设计确保了除雪机器人能够适应温室…
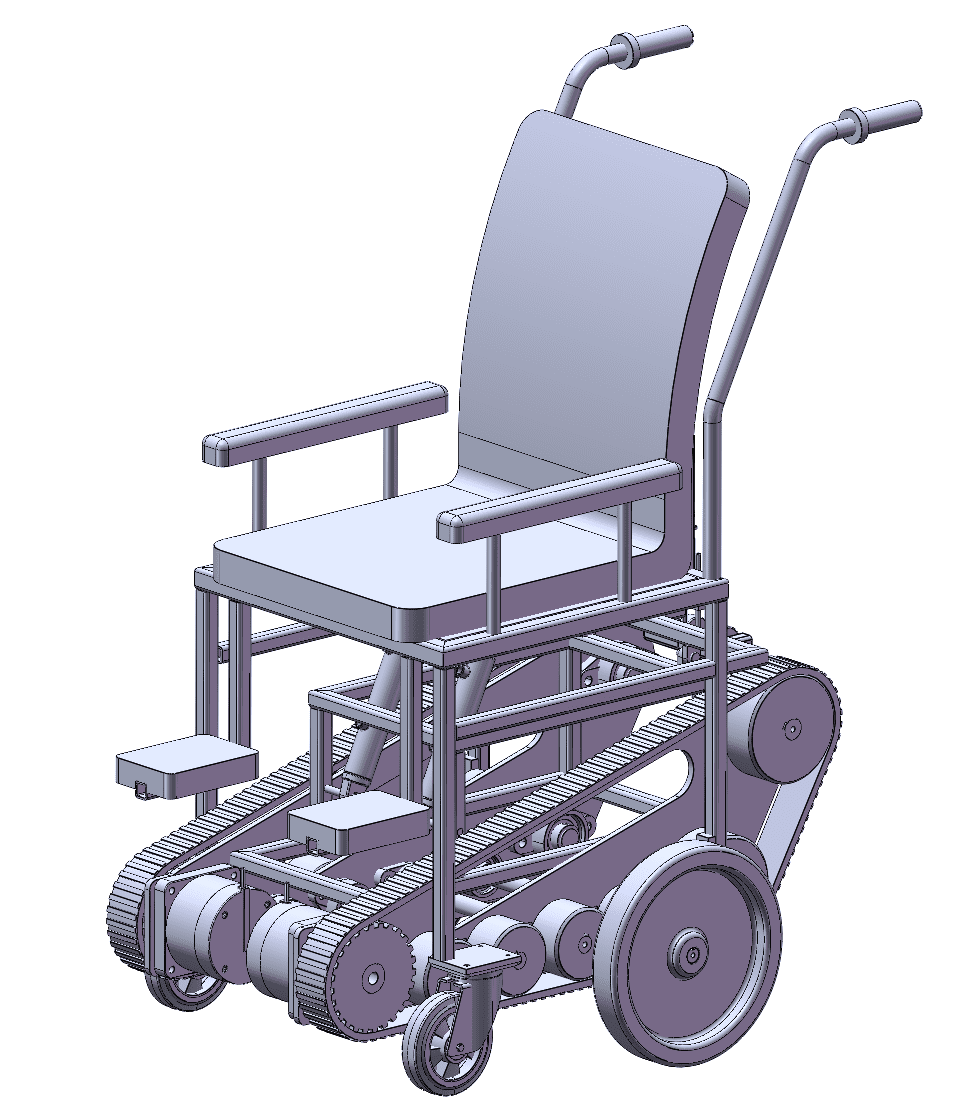
摘要 为解决传统轮椅依赖人力、难越楼梯障碍的难题,本文依托机械设计理论,成功研制自动轮椅。通过深入分析轮组式、履带式、腿足式爬楼机构的优缺点,选定轮履复合式结构,兼顾稳定性与经济性。研究过程包括确定总体方案,完成平地运动和履带爬楼机构的结构设计。选用直流无刷电机驱动轮式系统,有刷电机驱动履带系统。通过液压缸调整履带角度实现爬楼功能,精准设计履带接地长度和驱动轮参数。全面计算牵引性能、转向驱动力矩和传动轴强度,确保轮椅安全可靠。测试表明,该轮椅最大载重 105kg,爬楼坡度 35°,平地速度 0.4m/s,满足设计指…
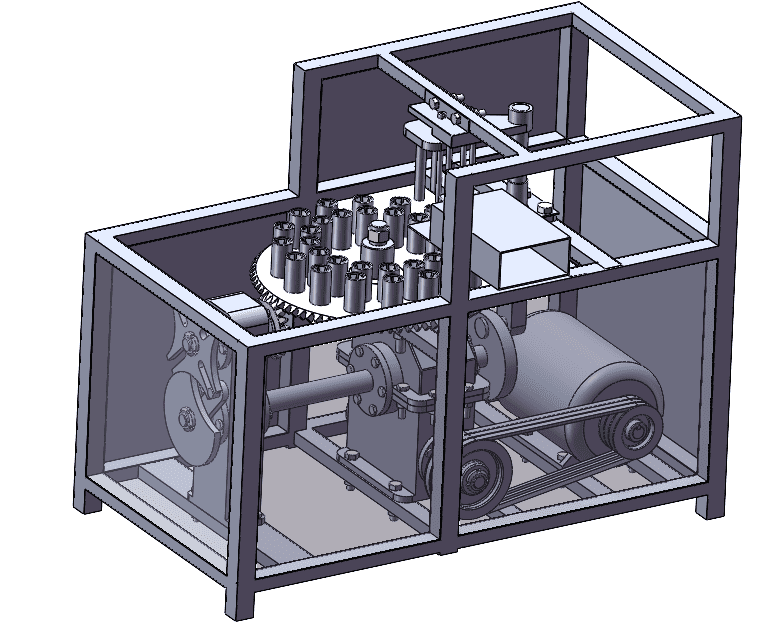
摘要 本文设计了一种联动红枣去核机,旨在提高红枣加工过程中的自动化水平和生产效率。通过对红枣去核机执行机构方案的深入研究,选择了对心曲柄滑块机构和槽轮机构作为核心执行机构,实现了冲针往复直线运动和旋转盘间歇转动的协调配合。同时,设计了合理的传动系统方案,确保了整个机械装置的运动精度和可靠性。基于ANSYS Workbench对红枣去核机的主要受载机构和机架进行了有限元仿真分析,验证了设计的合理性和可行性。结果表明,该联动红枣去核机结构紧凑、运动平稳、效率高,能够满足红枣加工企业的实际需求。本文的研究不仅提高了红枣去…
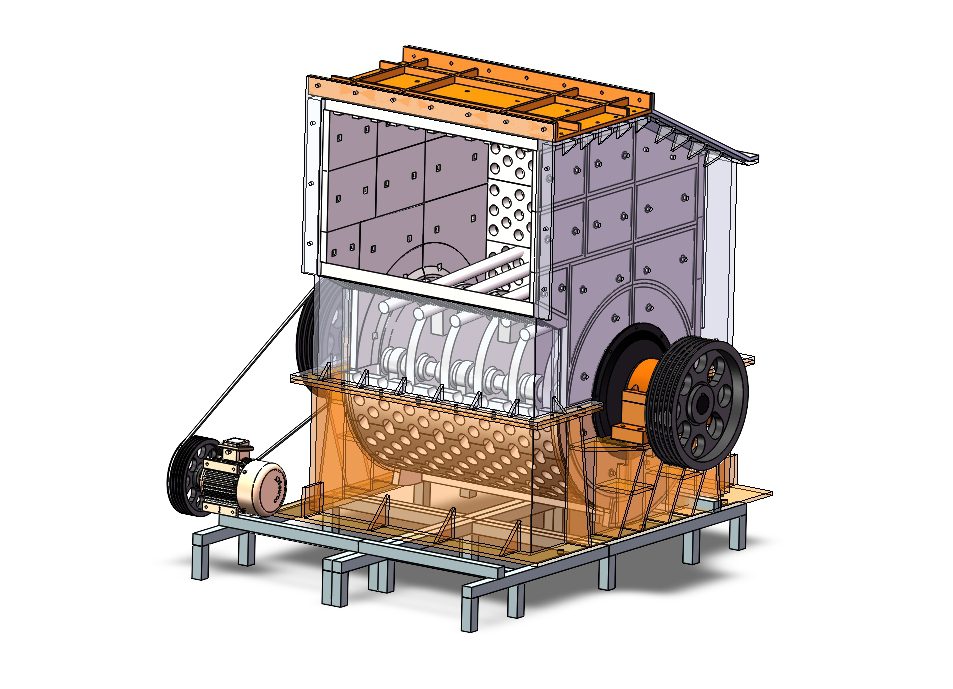
摘要 单段锤式破碎机在需要破碎物品的部门,如水泥厂,发电厂,机械厂等都有广泛的应用。本次课题主要是设计优化锤式破碎机整体结构。主要对安全装置、转子部件结构、锤头的选型设计等关键部件进行设计计算以及主要零部件的校核。此课题是单排单转子不可逆结构,设计 φ1600x1600 单段锤式破碎机结构为单排单转子。本设计通过对锤式破碎机工作原理、工作特点以及工作参数的了解,基本掌握了通用机械装备的单机设计的总体方案、设计计算步骤和全过程,在零部件设计过程中,对零件生产工艺以及配合等进行了深刻的学习。通过设计计算完成主题方案,并…
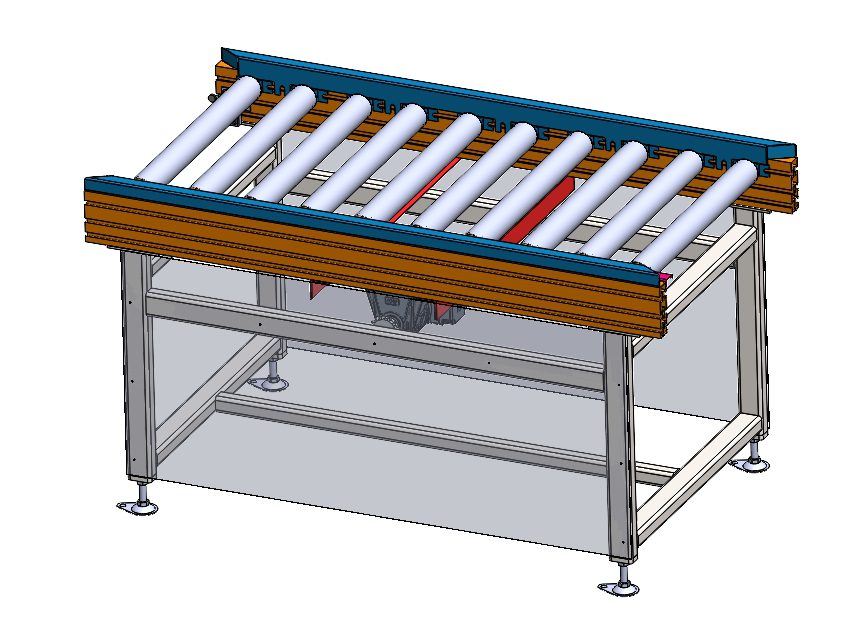
摘要 滚筒输送机作为现代物料输送的重要工具,其核心组件——滚筒,承担着传递动力和调整输送带方向的关键任务。滚筒的设计品质直接影响到整个输送系统的效能、安全性及可靠性。本课题聚焦于“滚筒式输送设备的设计”,旨在满足物流、制造和仓储等行业对物料搬运的多样化需求;通过模块化的滚筒结构和高性能的驱动系统,实现了物料输送的平稳与可靠。设计过程中,深入分析了滚筒式输送设备的工作原理,并进行了详细的机械传动部件设计计算,包括辊子长度与间距的确定、受力分析、电机选型、减速器类型选择及配齿计算等。同时,对关键零部件如链传动与链轮、张…
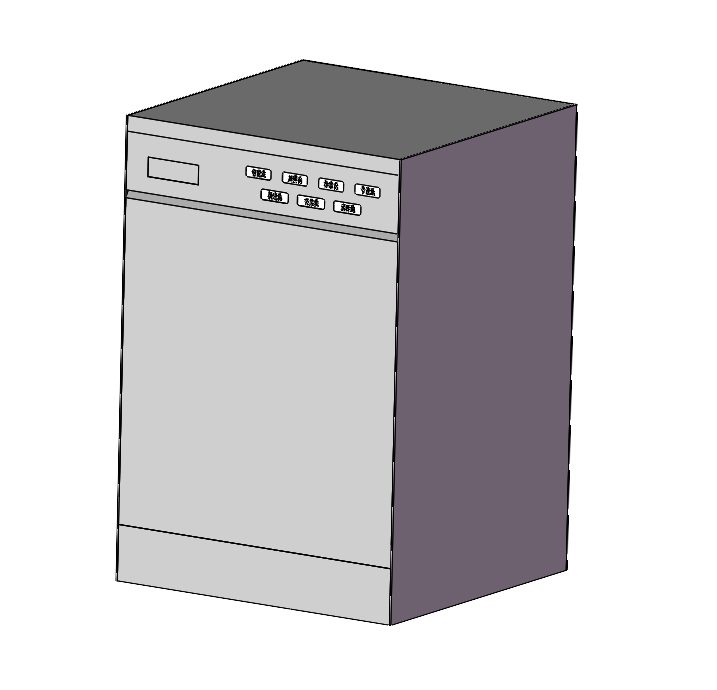
摘要 本文旨在探讨家用洗碗机结构设计的优化方案,以满足现代家庭对高效、便捷、节能洗碗机的需求。通过深入分析洗碗机的基本构造、工作原理及功能需求,结合国内外洗碗机的发展现状,本文提出了针对箱体材料、内部结构、碗篮架设计及关键零部件计算的优化方案。采用铝合金作为箱体材料,以提升产品性能和用户体验;优化内部结构设计,包括烘干器选择、进排水系统设计及臭氧发生器选型,确保洗碗机的高效运行和清洁效果;针对中国餐具特点,设计多种碗篮架方案,提高清洗效率和用户体验。此外,基于SolidWorks软件建立了洗碗机的三维模型,验证了设…
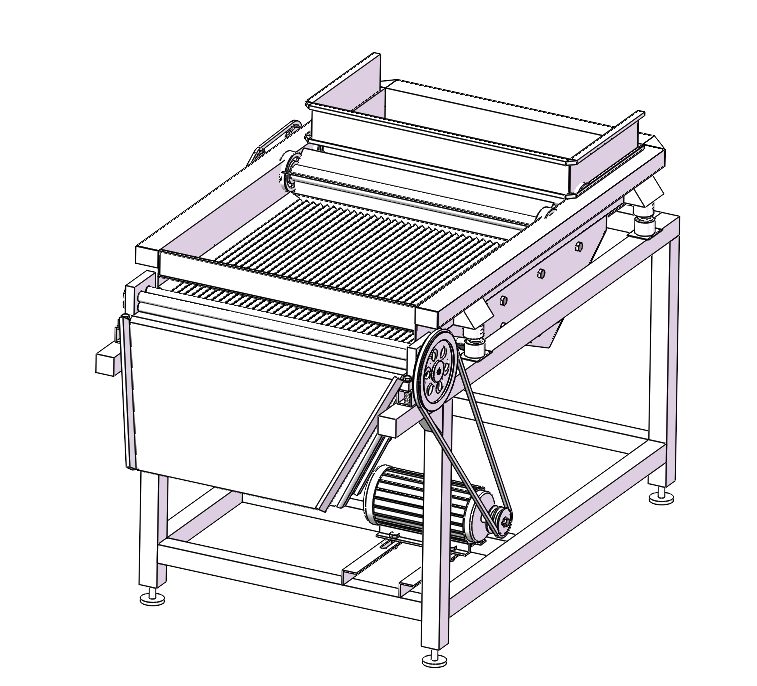
摘要 随着现代农业对高效加工设备需求的不断增加,对于毛豆去皮机的设计和优化显得尤为重要。本文围绕毛豆去皮机的结构设计展开了系统性的研究工作,其目的在于研发出一款具备高效、自动化特点,并且性能可靠的毛豆去皮设备。在喂料装置中,采用了三个呈120°分布的叶片,确保毛豆均匀喂料并避免堵塞。输送装置通过振动导向槽调整毛豆的位置,使其以正确的姿态进入去皮轧辊。去皮装置中的喂料轧辊和去皮轧辊通过齿轮传动实现同步转动,确保稳定夹持和高效去皮。为了适应不同尺寸的毛豆,设计了可调间距的支座,提高了设备的灵活性。在传动结构设计方面,采…
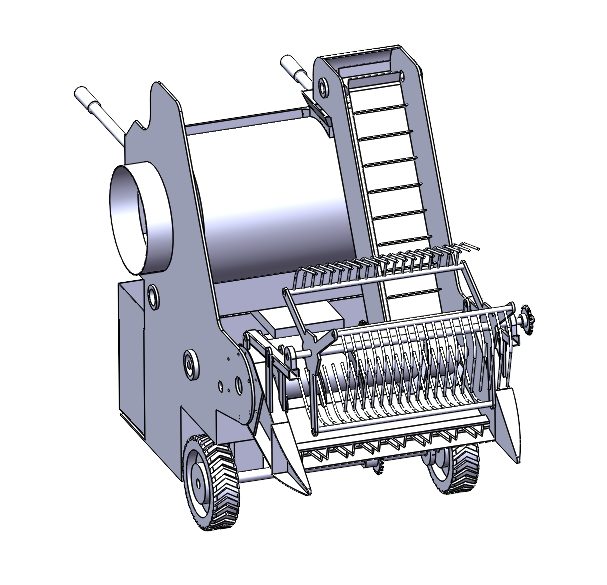
摘要 本文针对南方丘陵山区水稻收获作业效率低、劳动强度大及机械适用性问题,提出并设计了一种水稻微耕收割机。该收割机整合了微耕机与收割机技术,实现了耕地、收割、脱粒一体化作业,旨在提高农业生产效率,降低劳动强度。研究内容包括:设计小型化、轻量化、操作便捷的水稻收割机以适应复杂地形;对比分析不同驱动方式,选择柴油机作为动力源;详细设计了轴流滚筒式脱粒装置、滚筒盖板、凹板及滚筒等关键零部件,确保脱粒效率与质量;确定了整机的结构参数及工作流程。通过理论分析与计算,验证了设计的合理性和可行性。本文的研究成果为南方丘陵山区水稻…
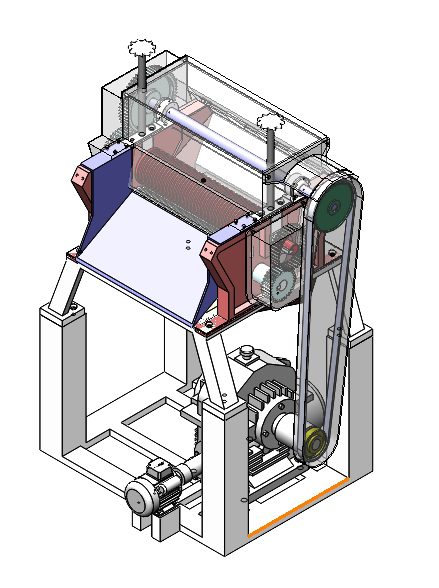
目录 1 设计任务 11.1 设计任务 12 设计思路 32.1 传动系统设计 32.2 喂料机构设计 32.3 辊轮的设计 42.4 甘蔗榨汁机的工作原理 43 甘蔗榨汁机主要零部件的建模及装配 53.1 传动机构的建模 53.1.1 小带轮的建模 53.1.2 大带轮的建模 63.1.3 大齿轮的建模 63.1.4 小齿轮的建模 73.1.5 轴的建模 83.1.5 传动机构局部装配图 93.2 榨汁机构的建模 93.2.1 辊轮的建模 103.2.3 其他零件的建模 113.2.4 榨汁机构局部装配图 123…
摘要 茄科蔬菜(如番茄、茄子、辣椒)是重要的经济作物,其产量和品质直接影响农业经济效益。然而,连作障碍、土传病害及环境胁迫等因素限制了其稳定高产。嫁接技术作为提高作物抗病性、耐逆性及产量品质的重要手段,广泛应用于现代农业中。然而,目前的嫁接作业仍以人工操作为主,存在劳动强度大、效率低、质量不稳定等问题,难以满足规模化、标准化的生产需求。本文针对茄科蔬菜嫁接需求,设计了一种自动化嫁接机的夹持与切削机构。夹持机构采用精确定位与柔性夹持相结合,确保接穗与砧木稳定固定,避免滑移或偏差影响嫁接精度;切削机构优化了刀具结构与切…


