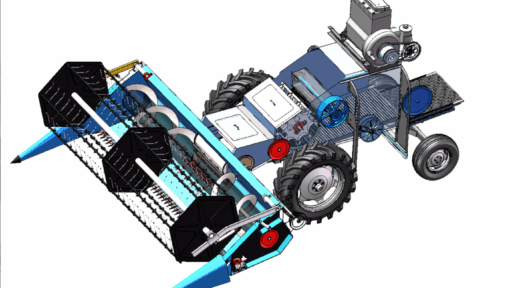
摘要 芦苇是一种高杆类禾草,植株高大,根茎具有通气组织,对当地水质有很好的净水作用,其长年生长在水中或一些潮湿地区,通常位于沟渠旁的沼泽地,广泛分布于世界各地。其根茎可用于造纸工业、生物制剂和工艺品,因其茎秆中含有大量植物纤维而倍受造纸业的青睐。传统芦苇收割通常在采用船式在水中进行作业,而岸式的芦苇自动收割机是其未来的发展方向,在芦苇收割打捆过程中合理利用空间,减轻了工人压力。芦苇收割机的创新性和智能化有待提高,尤其是遥控方式,不仅可以缩小整机体积,还可以提供更多的存储空间、节约成本。本文基于此设计了一种芦苇收割机…
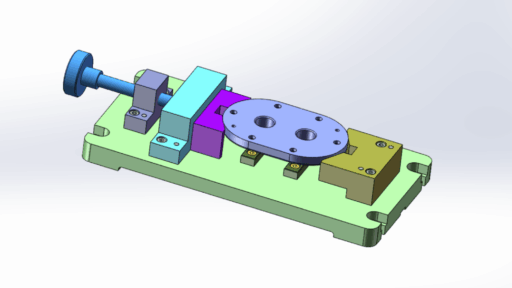
摘要 本课程设计主要内容包括齿轮油泵泵盖的加工工艺过程设计和钻盲孔的专用夹具设计,在课程设计过程中完成了零件图、毛坯图、夹具体装配图和夹具体零件图的绘制及说明书的编写。泵盖零件结构较简单,而且为铸件,外表面为要求较高精度要求,铸造即可满足,与其它接触面处的端面精度要求较高,需要经过粗车、半精车加工,保证密封配合性。本次设计针对盲孔的加工难度设计了一套专用夹具,采用一面两孔的定位方式来满足定位要求,又通过夹紧装置保证加工过程中不会产生较大误差。其中间过程对夹紧装置进行了受力分析,保证了夹紧的可靠性。综上所述为本次课程…
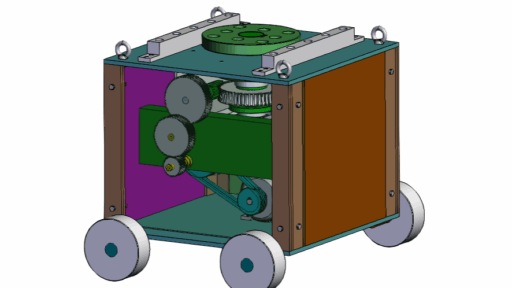
摘要 钢筋弯曲机是建筑业常用的工程机械之一,主要用于各种型号的钢筋的弯曲,以用于工程施工工地上。通过强度计算分析,认为现有弯曲机的大部分零件有较大的设计裕量,需要改变个别零部件及电动机功率即可大幅度提高加工能力,满足φ40 钢筋的弯曲加工。.本文所设计的半自动可调速钢筋弯曲机适用于弯曲 Φ6-Ф40 毫米钢筋之用,本机的传动机构采用全封闭式,变速杆换挡,可使工作盘得到两种转速,钢筋的弯曲角度由工作盘侧面的挡块调节,机械部分通过电器控制实现半自动。钢筋弯曲机适用于建筑行业弯曲 Φ6-Ф40 钢筋之用。 本机工作程序简…
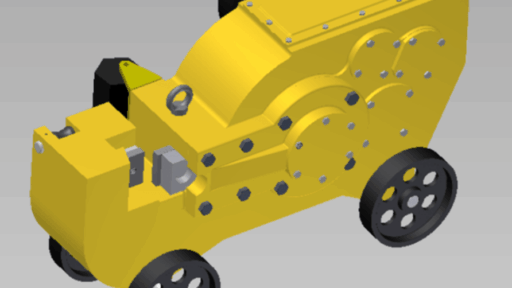
摘要 本产品设计给定的原始参数是:切断能力为(中6-中50)mm 的圆钢;电机功率为4kw;冲切次数为 28 次/min;切断行程为40mm。此次设计的主要研究内容和技术关键是:根据钢筋切断机的使用要求,确定其工作原理,在此基础上进行钢筋切断机的结构设计,确定主要结构尺寸。主要包括以下几点:1、电动机的选择;2、传动装置的设计和计算;3、轴承的选择;4、曲轴连杆机构的设计;5、机体的设计;6、刀片的设计选择。然后根据这些设计数据进行产品的建模及运动仿真。本次产品建模使用的是美国 Autodesk 公司的三维设计软件…
摘要 成型一充填一封口包装机是能够完成包装容器的成型,充填,封口的机器。按其功能可以分为袋成型一充填一封口包装机和热成型一充填一封口包装机两大类型。其中立式袋成型一充填一封口包装机是包装机械中应用最广泛,批量最大的机型之一,其特点是被包装材料的供料筒设置在制袋器内侧,制袋与充填物料由上到下沿竖直方向进行。该成型机器主要由计量装置,传动系统,横封和纵封装置,成型器,充填管及薄膜牵拉供送机构等部件组成。本次设计的包装机为三角包装袋形式的液体立式成型一充填一封口包装机,选用翻领式成型器,机械无级调速装置,高频加热式横封器…
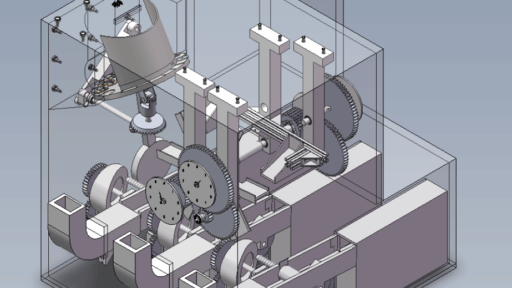
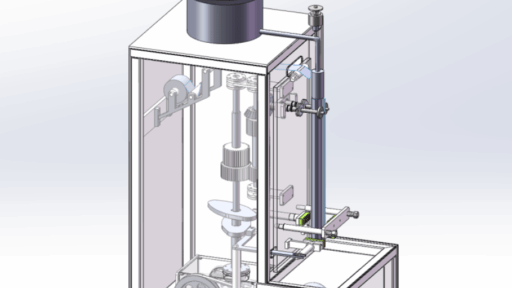
摘要 随着人类社会的快节奏发展,硬币流通自动化设备能够无人值守、全天候服务越来越受到消费者的青睐,目前在很多公共场合都得到了广泛使用。目前市场上的硬币流通自动化设备动则上万元、高昂的价格导致小商户使用困难。本文设计了一种新型的硬币分拣包装机,主体结构主要由3部分组成:1、分类机构;2、计数机构;3、整理部分。本文介绍了硬币分拣装置的研究现状,国内主要流通硬币的物理尺寸,并介绍了本文设计的硬币分拣包装机的工作原理。为防止硬币喂入处的堵塞问题,通过凸轮摇杆机构带动推板往复运动。通过分滑道实现硬币的分拣,根据不同硬币的直…
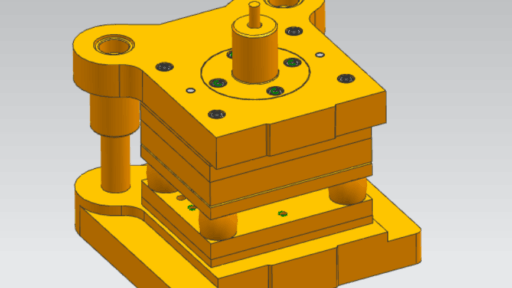
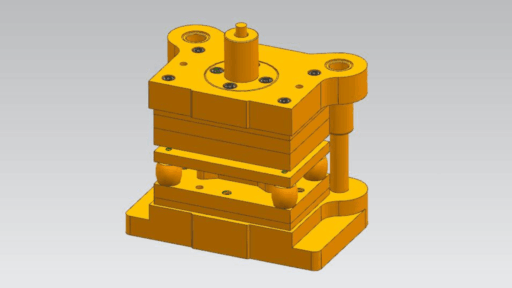
摘要 角垫片零件是一种常用的五金件,由于其本身的特殊性,导致了角垫片零件冲裁时精度难以保证,设计中,我们采用特殊的结构来完成角垫片零件五金件的冲裁。角垫片零件采用 Q235 制作而成,角垫片零件上的圆孔直径为 7mm。角垫片零件五金冲裁件可以采用落料和冲孔的复合模来进行冲压,本次主要针对角垫片零件零件进行设计通用性的模具,在保证工件生产精度的基础上,能够实现持续快速的成产。工件角垫片零件的设计流程:首先我们进行工艺分析,通过工艺分析我们对工件角垫片零件零件的结构和材料以及工序有个基本的了解,然后设计出合适的方案。方…

摘要 本文是对变压器铁芯片的冲孔及其落料模具的设计,通过对零件图形的结构和生产工艺性的分析,决定采取冲孔和落料在同一道工序完成的复合模,同时考虑到正装式复合模的冲孔废料直接由冲孔凸模从凸凹模内孔推下,结构简单,操作方便,故选用正装式复合模具。此正装式复合模具的设计,包含1.首先对零件的工艺性进行分析,然后选择了几个可行的方案,接着对工艺方案进行演算和比较,最终确定采用倒装式复合冲裁模,2.制订工艺流程,选择排样图,对材料的利用率进行计算,3.初步确定冲模结构,包括(1)模具的具体形式(2)定位装置(3)卸料装置(4…
摘要 随着社会工业化进程的发展和机械领域制造水准的逐渐提高,人们对于模具的需求使得模具在生产和技术方面都有促进的作用,俗话说生产决定了需求,一旦生产出来,社会对于产品的需求会促使产品按照需求进行改进和完善,甚至新的需求产生,促使心新产品的产生,模具从手工到自动化的跨越无不体现着这一点。模具的生产离不开社会的对其需求,如何生产出来符合社会需求的模具产品是整个模具设计的最先需求确定和最后需求达成的目标。从本次的设计任务要求可以看出,这次课题设计为纺织机摇架后支架冲压模具。首先通过工艺设计来确定本次的工件是从材料的选择,…
前言 本设计是拨叉夹具设计,包括了转拨叉专用夹具的设计以及撰写了设计说明为夹具设计应遵循以下原则,1.满足使用过程中工件定位的稳定性和可靠性:2.有足够的承载或夹持力度以保证工件在工装夹具上进行的施工过程;3.满足装夹过程中的简单与快速操作:4.易损零件必须是可以快速更换的结构,条件充分时最好不需要使用其它工具进行:5.满足夹具在调整或更换过程中重复定位的可靠性。 目录 前言第一章 加工零件的介绍第一节 被加工的零件图第二节 加工零件的简介第三节 工艺规程设计一、确定毛坯的制造形式二、制定工艺路线三、加工机床及工艺…


