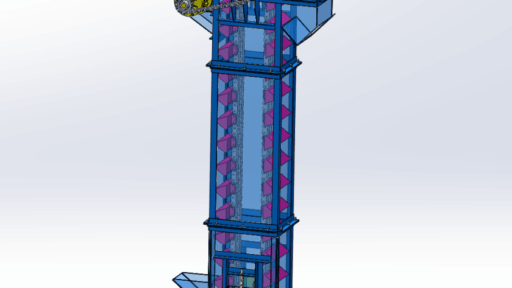
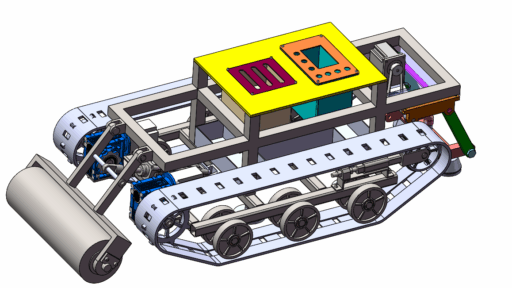
摘要 随着煤炭行业的不断蓬勃发展,越来越多的煤炭开采、运输等机械被应用,其中应用最广泛的就是提升机。针对市场现有产品存在耗能较大、传输效率低、驱动功率高、结构强度低、体积大、成本高运行不平稳、寿命低等问题。本文针对现存在的问题设计出一种新型的煤炭提升机,并进行整体结构的Solidworks 建模本文设计的煤炭提升机采用整体角钢作为基本框架,保证了强度,减轻了整机的重量,方便了维修,增加了寿命,节约了成本;通过对提升高度和能力进行计算分析设置驱动链条和链轮,当最大提升高度为5.2m,计算输送能力81m3/h,计算出料…
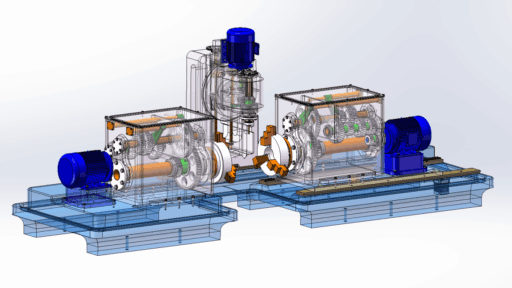
CXK6130 数控车铣复合加工中心机床的主传动系统的组成:同服电动机、齿轮传动件、第一主轴(Z轴)组件、第二主轴(W轴)组件、刀具主轴(B轴)及其传动件。第一主轴传动可实现主轴带动工件旋转和主轴夹持工件的分度功能;第二主轴传动也可实现主轴带动工件旋转、主轴夹持工件分度或把持着工件旋转的功能;刀具主轴(B轴)可实现更换铣刀和车刀对工件进行加工的功能。 CXK6130 数控车铣复合加工中心机床的进给传动系统的组成:主要由伺服电动机、齿轮传动件、滚珠丝杠传动件(X轴、Y轴、Z轴和 W轴)组成。X轴滚珠丝杠传动可实现车削…
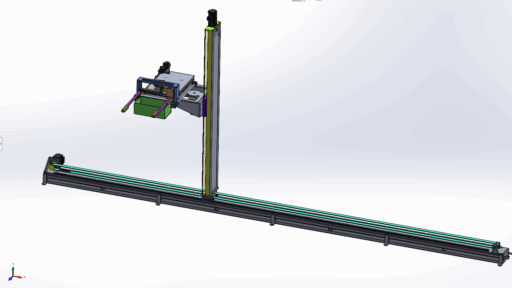
摘要 本论文旨在设计一种药房取药机械手结构,以提高药房工作效率和准确性。通过分析药房取药过程中的关键环节,确定了机械手需要具备的功能和性能。然后,根据功能需求,运用现代机械设计原理,进行结构设计和力学分析。在结构设计中,考虑了机械手的机械臂长度、关节数量和位置等因素,以增加其工作范围和灵活性。本论文设计了一种药房取药机械手结构,并通过实验验证了其有效性。该机械手能够满足药房取药过程中的需求,提高取药效率,减少错误。未来,我们将进一步完善机械手的性能,探索更多应用场景,以促进医疗服务的自动化和智能化发展。关键词:取药…
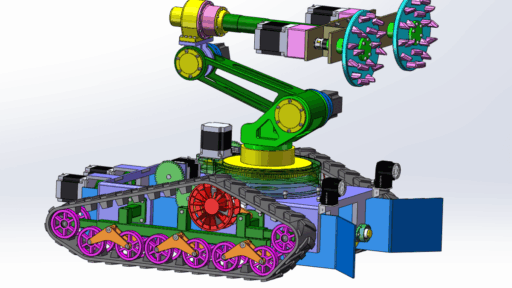
摘要 针对塔筒表面锈蚀处理效率低、人工成本高等问题,设计了一种基于气动喷砂技术的爬壁式自动化除锈设备。该设备以真空吸盘吸附与履带行走机构为核心,集成砂带打磨与柱塞式喷砂装置,实现塔筒表面粗精两级除锈作业。通过模块化结构设计优化喷砂头布局与气动系统参数,结合PLC控制实现行走路径规划与喷砂压力自适应调节,解决了传统除锈设备适应性差、能耗高的难题。研究结果表明,该设计兼顾高效性与环保性,能够显著提升塔筒维护的自动化水平,降低作业风险,为大型钢结构表面处理提供了一种创新解决方案。关键词:气动喷砂;爬壁机器人;结构设计;喷…
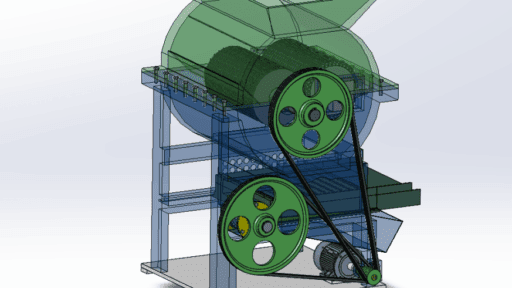
包含全套三维SW2024所有零件、部件以及总装配的三维,包含二维总装配图,端盖,大带轮,曲柄连接轴,网筛组件,主动辊组件等二维CAD图纸,包含设计计算书。
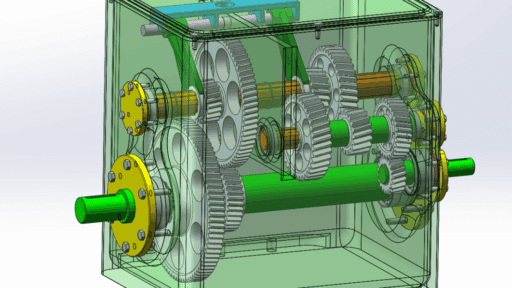
摘要 本课题针对设计的是一种家用轿车四挡变速箱结构设计及三维建模,对家用轿车四挡变速箱主要组成结构进行研究,传动系统设计进行分析。针对现在市场上的家用轿车四挡变速箱结构复杂、驱动力小、造价成本高、传输效率低等问题,本文对国内外市场产品现状进行分析,综合设计出一种家用轿车四挡变速箱,通过对传动系统进一步设计与布局,对传动系统进行如何增加效率进行结构排布,对所要达到的转速进行设计计算,对齿轮参数进行设计计算,对关键零部件进行校核等。并利用Solidworks 三维建模软件的建模、装配体等功能进行辅助设计和优化改进设计结…
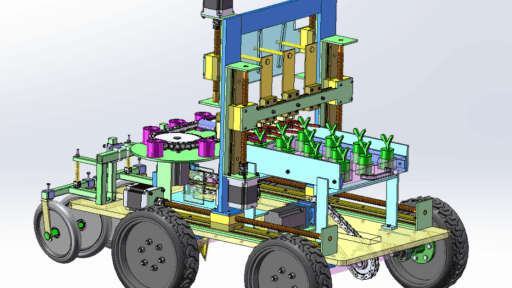
小型茄苗移栽机设计,包含整机所有零部件三维SW2018文件,包含二维CAD图纸有总装配图,插苗组件,等距调节组件,放苗盘,覆土组件,取苗组件,移苗组件,链轮等。包含设计计算书。
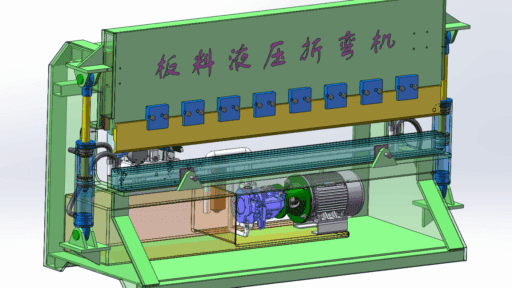
摘要 随着机加工行业的不断发展,各种折弯板料越来越广泛的被应用于现实的生产和生活当中,那么对于专门应用于板件折弯的折弯机的需求也越来越广泛,需求不断地增加,但是这种专用的机器存在着市场种类比较繁杂,效率大多数较低、功率损失大、噪声大、驱动力不足、操作不安全等问题。针对解决这些问题是非常紧迫的任务。鉴于以上存在的问题的解决,本文着重考虑各个问题,综合分析,设计一种液压驱动的板料液压折弯机,通过液压控制,大大减少了能量损失,提高了效率,增大了折弯力,减少了成本。本次设计的是一种新型的板料液压折弯机的整体机械结构和液压系…
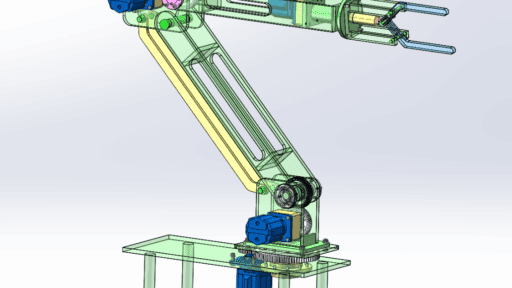
摘要 本课题针对设计的是一种五自由度液压机械手的结构设计及三维建模,对五自由度液压机械手主要组成结构进行研究,对机械手的液压系统进行研究。针对现在市场上的机械手结构复杂、驱动力小、造价成本高、效率低等问题,本文对国内外市场产品现状进行分析,综合设计出一种五自由度液压机械手,利用板料焊接而成的大臂、小臂等基本结构组件,保证强度的同时,减少了材料使用,降低了重量;采用液压驱动马达和油缸,可以获得较大驱动力;同时,对整个机械结构进行优化设计对大臂、小臂和夹持部分进行受力分析、传动系统计算、液压系统设计、液压控制元件的选型…


