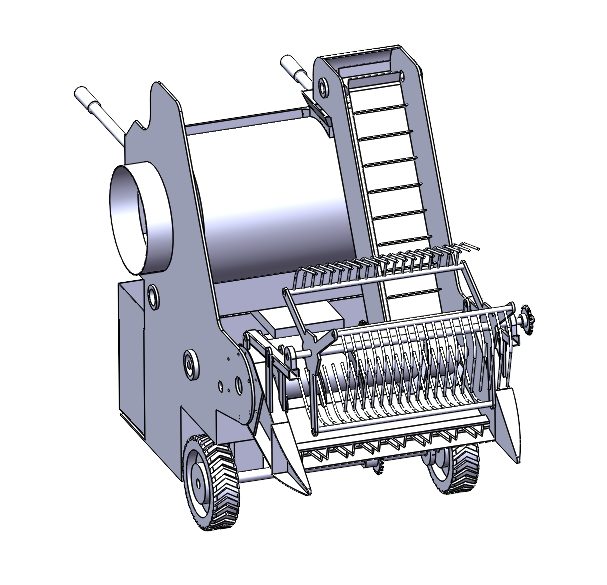
摘要 本文针对南方丘陵山区水稻收获作业效率低、劳动强度大及机械适用性问题,提出并设计了一种水稻微耕收割机。该收割机整合了微耕机与收割机技术,实现了耕地、收割、脱粒一体化作业,旨在提高农业生产效率,降低劳动强度。研究内容包括:设计小型化、轻量化、操作便捷的水稻收割机以适应复杂地形;对比分析不同驱动方式,选择柴油机作为动力源;详细设计了轴流滚筒式脱粒装置、滚筒盖板、凹板及滚筒等关键零部件,确保脱粒效率与质量;确定了整机的结构参数及工作流程。通过理论分析与计算,验证了设计的合理性和可行性。本文的研究成果为南方丘陵山区水稻…
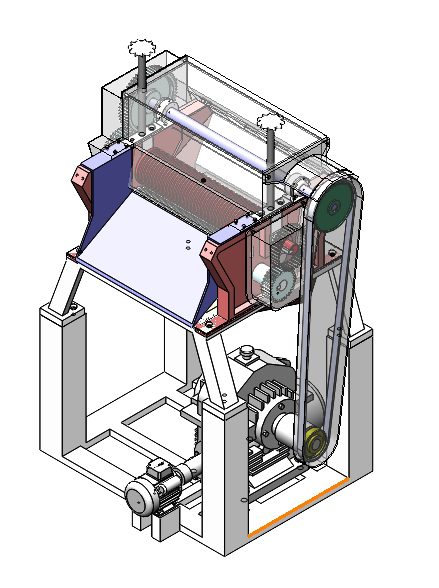
目录 1 设计任务 11.1 设计任务 12 设计思路 32.1 传动系统设计 32.2 喂料机构设计 32.3 辊轮的设计 42.4 甘蔗榨汁机的工作原理 43 甘蔗榨汁机主要零部件的建模及装配 53.1 传动机构的建模 53.1.1 小带轮的建模 53.1.2 大带轮的建模 63.1.3 大齿轮的建模 63.1.4 小齿轮的建模 73.1.5 轴的建模 83.1.5 传动机构局部装配图 93.2 榨汁机构的建模 93.2.1 辊轮的建模 103.2.3 其他零件的建模 113.2.4 榨汁机构局部装配图 123…
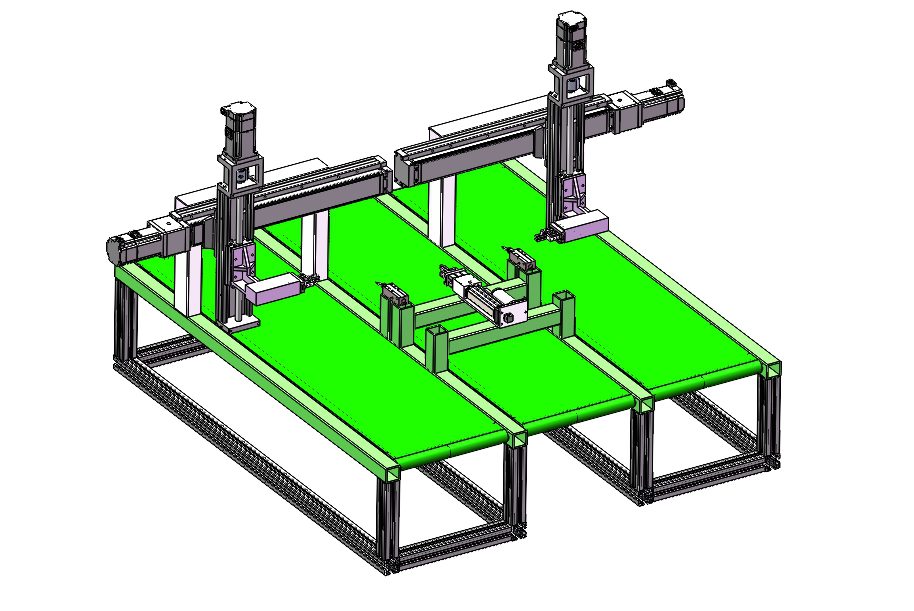
摘要 茄科蔬菜(如番茄、茄子、辣椒)是重要的经济作物,其产量和品质直接影响农业经济效益。然而,连作障碍、土传病害及环境胁迫等因素限制了其稳定高产。嫁接技术作为提高作物抗病性、耐逆性及产量品质的重要手段,广泛应用于现代农业中。然而,目前的嫁接作业仍以人工操作为主,存在劳动强度大、效率低、质量不稳定等问题,难以满足规模化、标准化的生产需求。本文针对茄科蔬菜嫁接需求,设计了一种自动化嫁接机的夹持与切削机构。夹持机构采用精确定位与柔性夹持相结合,确保接穗与砧木稳定固定,避免滑移或偏差影响嫁接精度;切削机构优化了刀具结构与切…
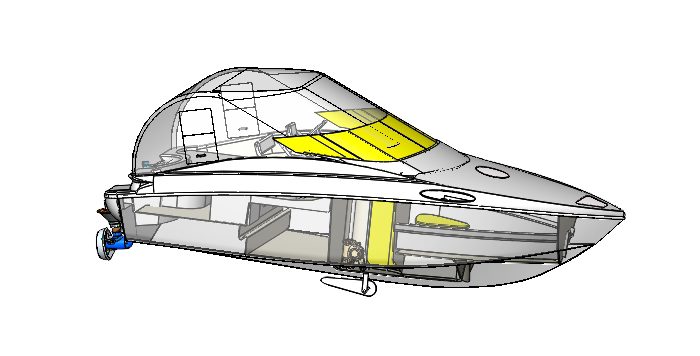
摘要 随着国际海洋工程事业的快速发展,全球对海上人命安全的重视前所未有。为实现这一目标,国际海事组织于1974年正式通过了国际海上人命安全公约修正案,要求救生设备在设计、生产、使用和配套维护方面达到更高的标准,并明确了救生设备的相关要求。在1983年,国际海事组织还通过第A.536(13)号决议,批准了《潜水系统安全规范》的规定和指导意见。该规范要求在执行弃船或撤离任务时,船舶必须配备一个高压逃生撤离系统,以确保处于高压或减压状态下的饱和潜水员能够在紧急情况下安全地撤离。这一系统不仅需满足国际海事组织的相关规范,还…
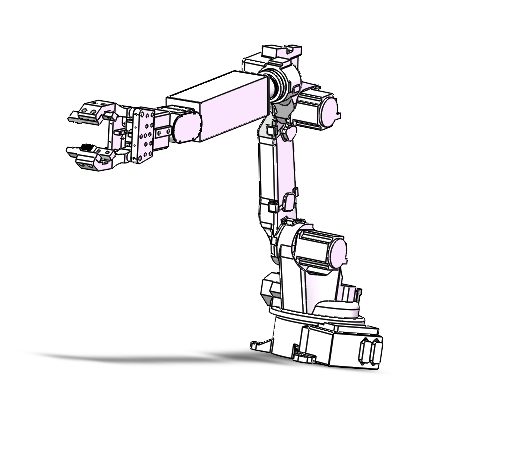
摘要 随着经济社会的发展以及人们物流管理意识的增强,提高工具效率,降低物流成本已经成为物流管理的首要任务。无论采取什么样的物流技术与管理模式,最终的目的都不在于这种模式与技术本身,而是要通过物流系统的整体优化,在保证一定的物流服务水平的前提下实现物流成本的降低。本文介绍了一种新型的物流搬运机械手,该机械手具有六自由度,可以在狭小的空间内完成三维运动,成为物流搬运中极具潜力的工具。文章详细介绍了机械手的构造和工作原理,以及其应用领域和优势。同时,也对机械手的结构进行了详细的设计说明。该机械手主要用于箱体类物体搬运工作…
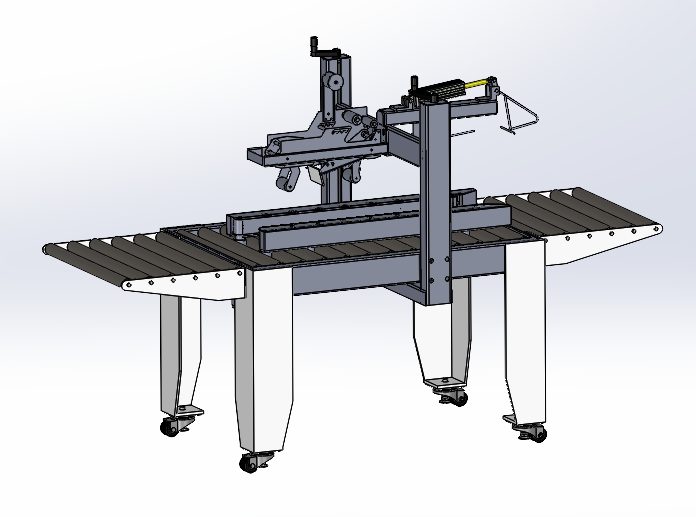
摘要 封箱机器人能大幅度地提高生产效率,加快产品的不断更新;降低劳动强度,改善劳动条件;能节约材料,降低成本,保护环境;有利于被包装产品的卫生,提高产品质量。本次课题设计的是纸箱胶带封箱机器人,采用传送带驱动来进行封箱的方案,上下封箱、经济、快速、平稳。这种方案在技术上是相当成熟的一种,它被广泛应用于生产实际中。这次设计的纸箱胶带封箱机器人,可以根据纸箱规格,手动调节宽度及高度,可单机作业,也可与自动化包装流水线配套使用。工作时,当箱体进入工作空间后,箱体在底部传送带的输送下前进。当箱体运行至刀架位置时,箱体将刀架…
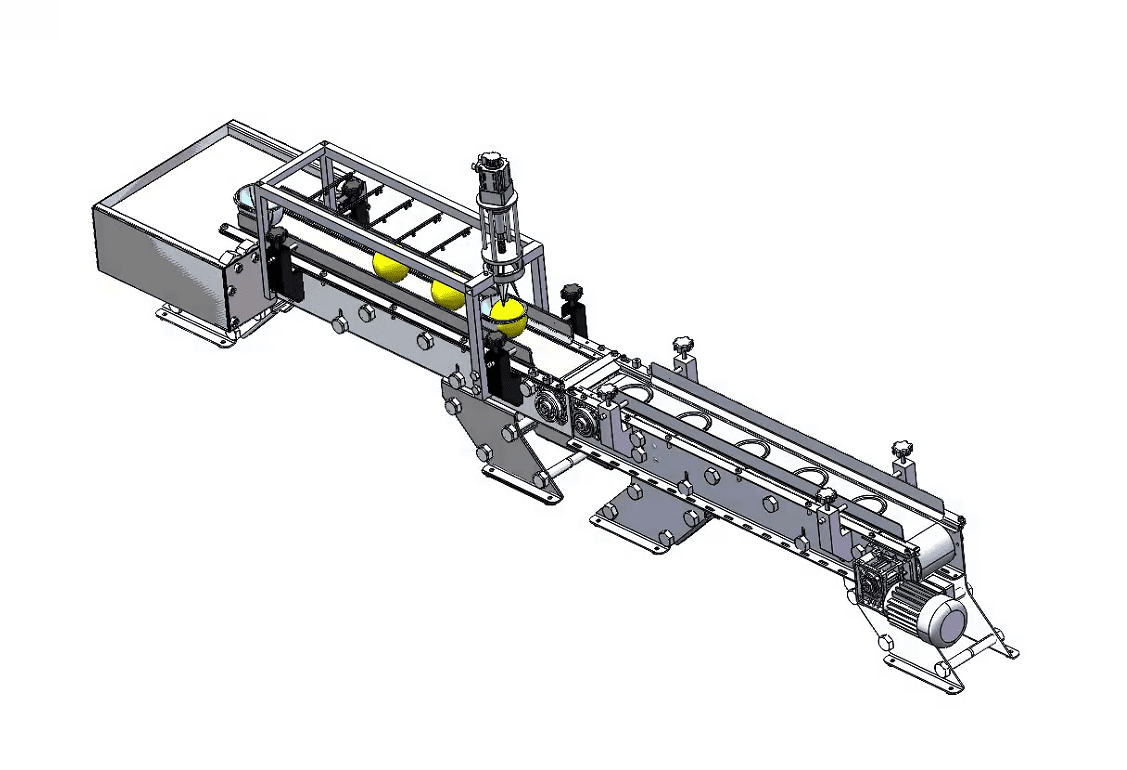
摘要 随着榴莲产业的发展和劳动成本的上升,对榴莲进行机械化清洗和剥壳的需求日益增长。尽管市场上存在一些榴莲处理设备,但它们可能存在效率不高、操作复杂、维护成本高或者对榴莲果实造成损伤等问题。通过榴莲清洗剥壳机的设计原理、结构组成、工作效率、安全性评估以及经济性分析等方面,为榴莲加工行业提供一种创新的解决方案。设计和开发一种高效、安全、经济且易于操作的榴莲清洗剥壳机,以提高榴莲处理的自动化水平,减少人工劳动强度,提升生产效率。探索和优化榴莲清洗剥壳机的工作流程,确保在处理过程中对榴莲果实的损伤最小化,保持果肉的完整性…
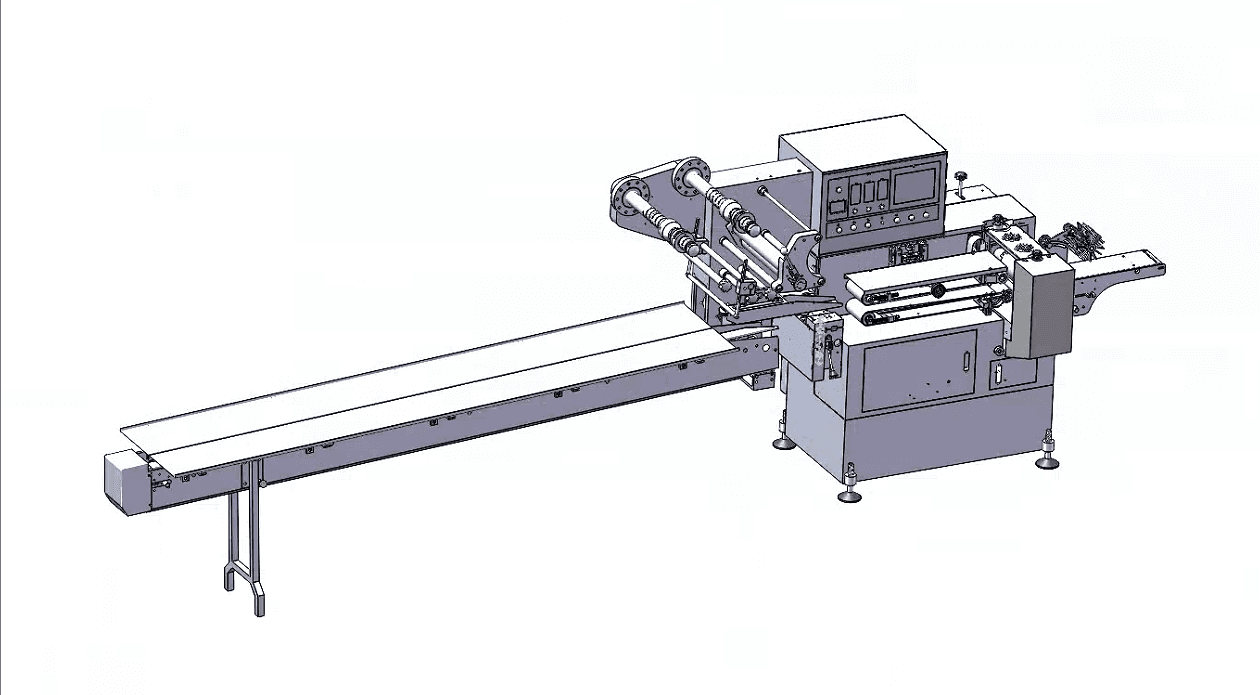
摘要 果蔬包装机是用于包装产品,使产品增长其保质期,增加产品美观度的一种机械。本次设计采用卧式袋成型-充填-封口包装机,其结构简单,传动平稳,噪声小,使用维修方便,效率高,所以在各类机械中得到了广泛的应用。有了这样的包装机,会提高生产效率,降低劳动强度,保护环境,节约材料;有利于保证被包装产品的卫生,提高产品质量,延长产品的保质期;可减少包装场地面积,节约基建投资,赢得更多的利润。本课题主要针对果蔬自动包装机进行反求设计,主要作了以下几方面的工作:对果蔬自动包装机工作原理和结构进行了研究和分析,在此基础上进行整机的…
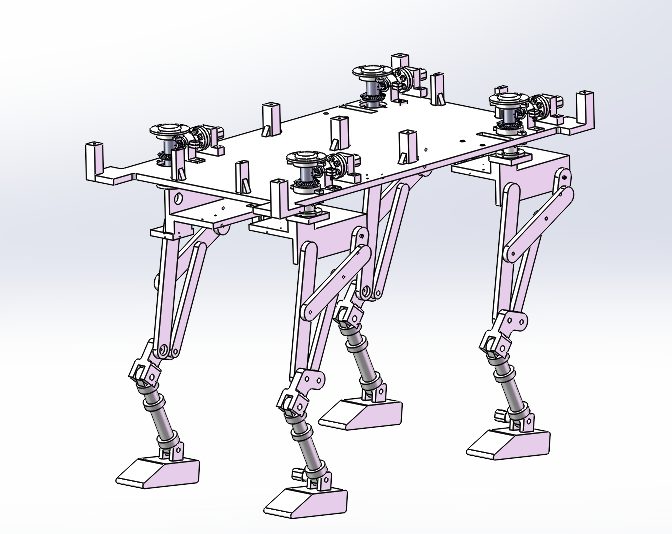
摘要 机器人的发展对衡量一个国家的科学技术水平有着重要的意义。它也是国家综合实力的另一种表现。而仿生机器人在机器人领域一直是近些年比较热门的研究。对于仿生机器人,很多科研人员从模仿动物行走开始,一直致力于这方面研究。如何在复杂的环境中,让机器人正常行走,一直是科研人员关注的热点问题。本次毕业设计从仿生原理设计了一款步行仿生机器人。结合国内外仿生步行机器人发展和设计要求,确定了本次课题的方案和研究目的。主要对马的对角小跑步矩进行仿生分析,完成本次步行仿生机器人的结构设计。完成的主要内容有步行机器人总体方案设计、足腿机…
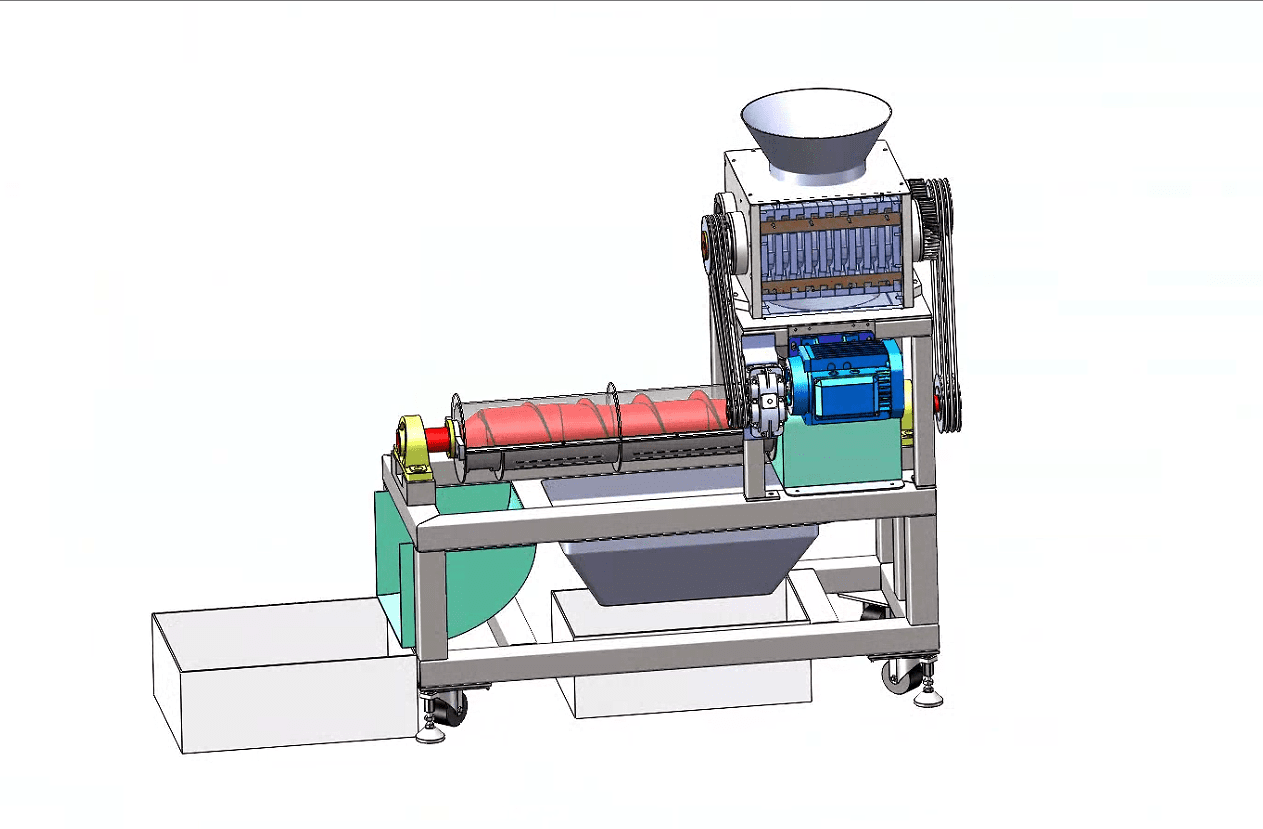
摘要 本研究针对厨余垃圾处理难题,设计了一种高效、环保的厨余垃圾粉碎机。通过双轴对向旋转粉碎和螺旋挤压输送技术,实现对厨余垃圾的有效粉碎和固液分离,显著减少垃圾体积和重量,提高处理效率。设备结构包括粉碎装置、挤出出料装置、传动系统及辅助装置,通过合理设计确保高效粉碎和低噪音运行。通过有限元分析验证了关键零件的强度,确保设备运行的可靠性和稳定性。本研究设计的厨余垃圾粉碎机不仅能有效解决厨余垃圾处理难题,还能促进资源循环利用,减少环境污染,具有广泛的应用前景。 关键词:厨余垃圾;粉碎机;挤出装置 目录 1 绪论 11.…


