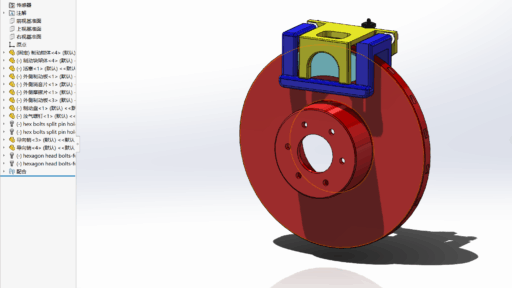
摘要 本文旨在设计并分析一种盘式制动器,以满足现代汽车对制动系统的高性能要求。首先,介绍了选题的背景及意义,指出了盘式制动器因其优越的散热性能、稳定的摩擦特性和紧凑的结构设计,在汽车制动系统中占据重要地位。接着,综述了国内外关于盘式制动器的研究现状,明确了本文的研究方向和内容。在制动器的结构与设计原则部分,详细阐述了汽车制动系统的功用及分类,介绍了盘式制动器的分类、结构与工作原理,并提出了制动器设计的一般原则,包括制动效能、制动效能稳定性、制动间隙调整简便性、制动器的尺寸及质量以及噪音的减轻等。在制动器设计章节,根…
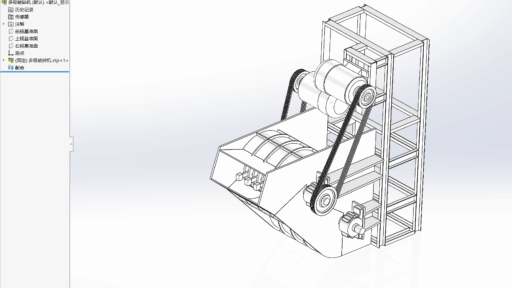
摘要 本文设计了一种煤粉压球机,旨在通过高压压制技术将煤粉等粉末状物料成型为球形固体燃料,提高煤炭的清洁利用效率和成型质量。研究内容涵盖了煤粉压球机的总体结构设计、关键部件设计与分析、传动系统设计与校核等方面。通过方案筛选与比较,确定了最优设计方案,并详细设计了压辊、型辊材料等关键部件。传动系统经过精确计算与校核,确保了设备的稳定运行。本研究成果对于推动清洁能源技术的发展和煤炭资源的清洁利用具有重要意义。 关键词 煤粉压球机;粉煤成型技术;关键部件设计;传动系统设计 目录 摘 要 - 1 -ABSTRACT - 2…
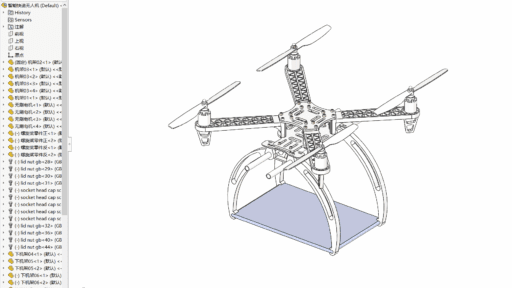
摘要 本文围绕智能快递投送无人机的设计展开研究,旨在探索一种能够高效执行运送任务。文章首先分析了海上救援工作的现状与挑战,强调了研发无人机进行海上救援的重要性和迫切性。随后,对国内外在海上救援无人机领域的研究现状进行了综述,指出了国内在该领域的发展潜力和研究方向。在无人机的总体方案设计中,本文详细阐述了无人机的构型选择、性能要求以及救援方案的制定。通过对比分析不同构型的优缺点,确定了采用固定翼构型作为海上救援无人机的主体结构。同时,结合救援任务的实际需求,对无人机的载荷能力、航程、稳定性等关键性能进行了优化。在无人…
摘要 运输油气运输中最主要的最快捷、经济、可靠的方法可以用于运输的水,石油,天然气,石油等,输量,距离长,安全性高,低成本的优势,在各国快速发展。运输业的主体,工程的核心工作是管口焊接。所以研究高效、性能可靠全自动焊接机的位置具有十分重要的意义。野外工作解决建设的自动焊接的难题,开发了一种轨道式焊接机,它的主要技术开发,包括:新型走的机构,焊头挥杆机关,和机卡车,焊头机械手。介绍的轨道式焊接机的构造设计和焊接机控制,重点其结构的特征,动作原理,设计要点的设计分析和说明。在现场,使用该功能向导平稳,可靠性高一直走,位…
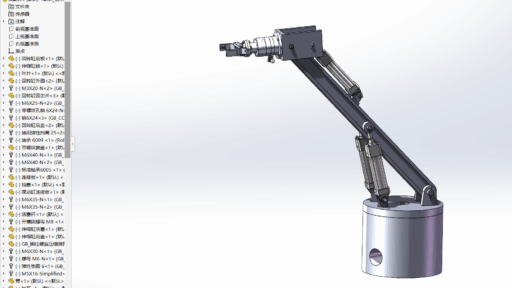
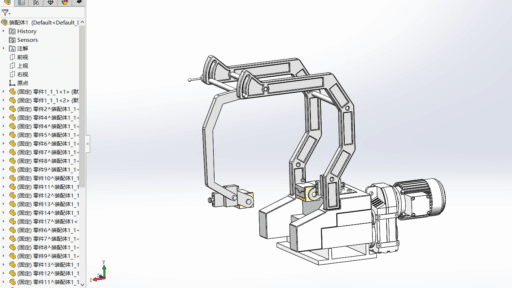
摘要 R175柴油机机体自动加工线多功能液压机械手采用活塞液压缸机构,通过活塞杆的直线运动带动杠杆机构和手爪,将工件夹紧,完成抓取动作。当液压缸断油时,活塞杆通过弹簧复位,从而松开工件。腕部采用叶片式回转缸机构,叶片带动机械手回转轴转动,完成机械手转动动作。手臂采用液压缸和连杆的组合机构,活塞杆与手臂铰接,通过活塞杆的直线运动来实现俯仰动作。本设计机械手为R175型柴油机机体加工自动线上的辅助装置,能完成上料、转位和翻转功能,能够在球面空间内完成送料。 关键词:液压传动;机构;动作 目录 前言………………………………
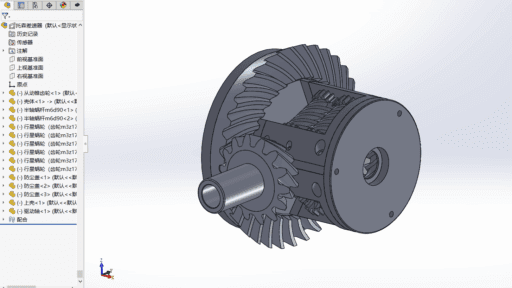
摘要 随着世界汽车行业的快速发展,汽车核心部件之一的差速器也在经历着巨大的变化,各式各样的差速器应运而生,相对国外差速器的发展与研究水平,国内相关设计与研究还处于追赶阶段。本次设计课题就主要来源于此,针对一款具体车型作托森差速器的设计与仿真。本次设计的具体要求是设计出差速器的结构以及相应的尺寸,并进行三维建模以及运动仿真。针对此次设计,我做了以下工作,通过查阅大量的文献,分析了过内外差速器发展与研究现状,了解了差速器的结构,工作原理,以及种类。通过大量的对比分析出了每种差速器的优点与缺点,综合各方面的因素和实际情况…

摘要 本文围绕智能喷药无人机的设计与应用展开研究。首先,对智能喷药无人机进行了分类,并详细探讨了其喷头分类及雾化原理,包括压力喷头、旋转(离心)喷头以及风送式喷头,分析了各类喷头的雾化性能指标。同时,介绍了精量调节技术的原理及其发展情况,为实现精准喷药提供了技术支撑。在无人总体方案设计部分,本文选定了适合的无人机平台,并进行了总体方案设计。随后,重点对无人机的关键零部件进行了设计,包括喷施装置、电机选型与计算、机身设计、喷臂设计以及起落架设计等。通过合理的结构设计和优化,确保了智能喷药无人机的性能稳定性和作业效率。…
摘要 网球捡运AGV是用于网球体育运动中的自动捡球装置,主要用于网球训练过程中代替人工进行捡球、运球,是一种自动化、高效率、智能化的设备。本文主要介绍了网球捡运AGV的技术特点和国内外发展现状。根据其工作原理设计了基于视觉识别、激光雷达避障、智能路径规划的网球捡运AGV设备,旨在满足网球体育运动中实现对捡球动作的高效、精准需求。该AGV主要由底盘系统、悬挂系统、转向系统、动力系统、导引系统、捡(移)运装置、外壳等部件组成,具有结构紧凑、操作稳定、效率高的特点。其中,捡(收)运装置通过同步带传动和丝杠传动实现了捡球动…
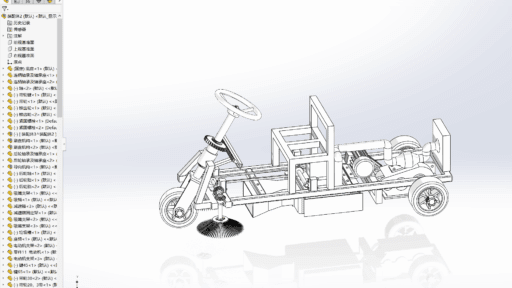
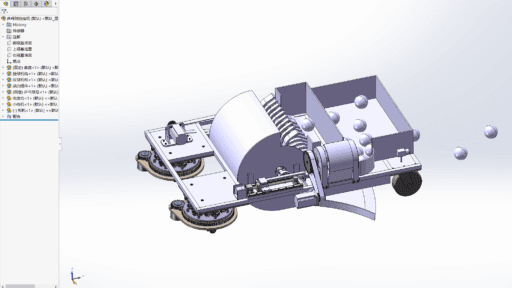
摘要 随着城市化进程加快,传统人工清扫方式已难以满足城市地面垃圾处理的高效、环保需求。本研究设计了一款适用于社区、校园等半封闭场景的城市地面垃圾清扫机,通过机械化和智能化技术提升清扫效率,降低环境污染。该设备采用“中置两盘刷+后置吹吸复合式吸嘴”的模块化结构,集成清扫、收集、降尘功能,配备Y132M-4电动机(7.5kW)实现动态功率分配,优化行走系统(1.1-2.0kW)与风机系统(0.76kW)的协同作业,清扫效率达200㎡/h,垃圾残留率低于5%。关键部件设计包括尼龙-不锈钢复合旋刷(直径500mm)、C6-…
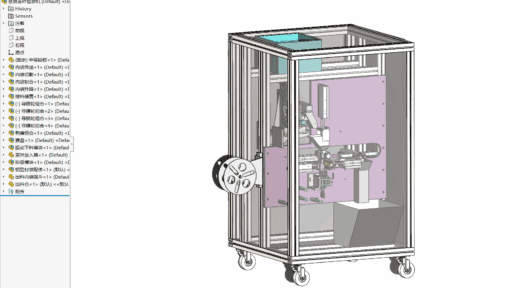
摘要 本文针对茶叶包装机的结构设计进行了深入研究。首先,在绪论部分阐述了茶叶包装机选题的背景及意义,分析了国内外在茶叶包装机领域的研究现状,指出了当前茶叶包装机存在的问题,并明确了本文的主要研究内容。在总体方案设计部分,根据茶叶包装的基本要求,设计了工艺流程,并提出了具体的方案设计。该方案详细描述了茶叶包装机的工作原理,包括供膜、内袋升降、振动下料、称重、内袋封合、内袋切割及内袋传送等关键步骤,为后续的零部件设计提供了理论基础。在关键零部件设计部分,重点对供膜机构、内袋升降机构、振动下料机构、称重模块、内袋封合装置…


