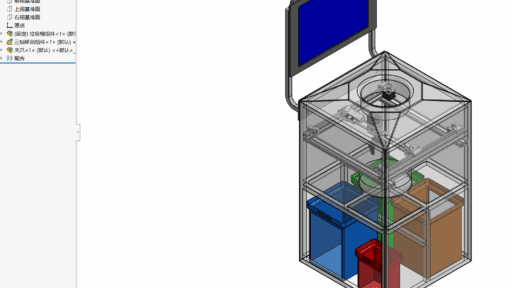
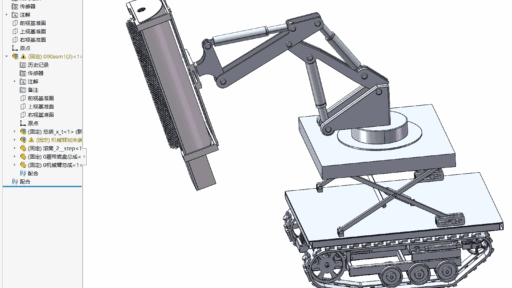
摘要 随着城市化进程的加快,生活垃圾产量急剧增加,传统人工垃圾分类方式存在效率低、错误率高等问题。本课题旨在设计一种智能垃圾分类机械手臂及其控制系统,以提高垃圾分类的效率和准确性。研究工作主要围绕智能垃圾分类机械手臂的结构设计和控制系统开发展开,涵盖了识别模块、三轴移动模块、Z轴组件模块和夹爪组件模块的设计与实现。本论文采用机器视觉和PLC控制技术,通过双目摄像头扫描识别垃圾类型,结合三轴移动机构实现机械手臂的精确移动,Z轴组件控制夹爪升降, 夹爪组件完成垃圾的夹取和分类投放。设计过程中,详细分析了各模块的具体结构…
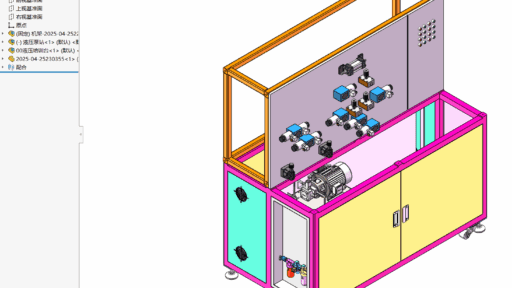
摘要 本文研究了桑葚自动制干装置的设计,旨在解决传统加工方式效率低、品质不稳定的问题。通过集成清洗与烘干功能,设计了一种高效、节能、自动化的桑葚清洗烘干一体机。研究方法包括理论分析与结构设计,采用喷淋清洗与超声波清洗结合的方式,配合热风烘干与红外线烘干技术,实现桑葚的高效清洗与烘干。研究结果表明,该装置能有效提升加工效率,降低损耗 ,保障桑葚品质。主要结论为,该装置设计合理,具有显著的经济效益与社会价值。关键词:桑葚自动制干装置;清洗烘干一体机;喷淋清洗;超声波清洗;热风烘干;红外线烘干 目录 1 绪论 11.1 …
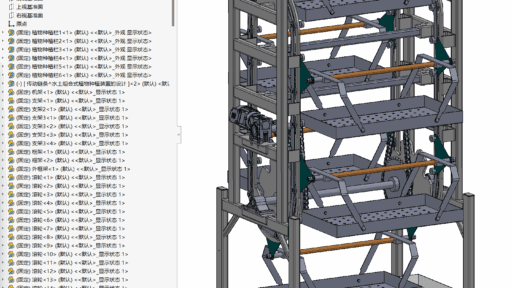
摘要 针对传统种植模式资源利用率低、扩展性差及智能化不足的问题,本研究设计了一种水土组合式植物种植装置。装置采用模块化结构,集成水槽、土培皿、支撑架及循环系统,结合轻质铝合金框架与可拆卸接口实现水培/土培动态切换。通过蜗轮蜗杆与链传动系统驱动种植单元循环移位,选用Y132S-6三相异步电机(额定功率3kW,传动比24.81),确保负载稳定性。有限元分析表明,种植架最大应力44.934MPa,变形量0.05mm,低于材料屈服强度。控制系统基于西门子S7-200 SMART PLC,集成温湿度、光照传感器,响应时间≤1…
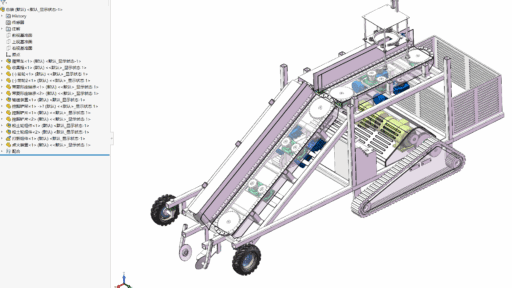
摘要 本文研究了自走式大葱联合收获打捆机的设计。针对我国大葱收获机械化水平低、劳动强度大、效率不高的问题,本文提出并设计了一种集旋耕分土、挖掘、清土清杂、夹持输送、收集装框及打捆功能于一体的联合收获机。通过深入分析大葱物理特性和种植农艺,设计了关键部件如松土铲、夹拔装置和打捆装置。采用有限元分析验证关键零部件强度,进行传动系统设计与校核,确保系统可靠性。控制系统设计实现了对各执行部件的精准控制。研究结果表明,该机可显著提高大葱收获效率,降低劳动强度,具有现实意义和推广前景。关键词:大葱收获机;联合收获;打捆装置;传…
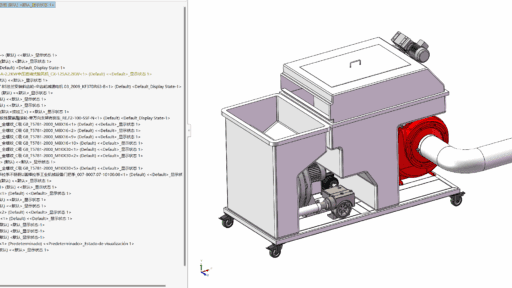
摘要 海洋球清洗机的设计研究正是针对这一行业痛点展开的探索。从公共卫生角度看,传统人工清洗方式存在效率低下、消毒不彻底、水资源浪费等问题,而现有自动化设备往往难以适应海洋球特殊形态导致的清洁死角。开发专用清洗装置不仅能够通过机械结构优化实现球体表面与缝隙的深度清洁,还能集成紫外线杀菌、热风干燥等模块,构建系统化清洁解决方案。这种技术创新对预防儿童交叉感染、降低手足口病等传染性疾病传播风险具有直接意义。在本次课题中,我首先通过深入的文献研究和资料调查,全面分析了当今设计领域的前沿内容,明确了研究方向。接着,我使用了三…
摘要 随着我国分布式光伏发电站数量的增加,光伏组件表面积灰问题日益严重,影响了光伏发电效率。本课题旨在设计一种光伏板清扫机器人,以提高光伏电站的发电效率。研究的主要对象为适用于复杂地形的分布式光伏电站光伏板清扫机器人,研究范围涵盖机器人的结构设计、清洁机构、行走机构及升降台等方面。论文采用结构设计方法,通过详细的理论分析和计算手段,设计了光伏板清扫机器人的整体结构。 清洁机构采用滚刷方式,实现了高效清洁;行走机构采用履带式,以适应复杂地形;升降台采用液压缸驱动的单叉剪叉式机构,确保了机器人的平稳升降。通过对滚刷机构…
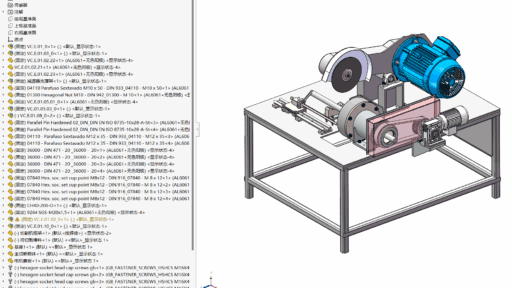
摘要 本文研究了钢筋切断机的设计与优化,旨在提升建筑行业钢筋加工效率与精度。通过对比分析国内外钢筋切断机现状,确定了采用曲柄滑块机构、气缸驱动和V带传动的总体设计方案。利用三维建模软件SolidWorks完成了关键部件的三维建模与装配,并对电动机、V带传动、气缸及轴承等核心组件进行了详细设计与校核。研究结果表明,优化后的钢筋切断机结构稳定,切断效率高,能够满足市场需求。本研究为钢筋切断机的智能化、高效化升级提供了理论依据和技术支持。 关键词: 钢筋切断机;V带传动;气缸驱动;结构设计;三维建模 目录 摘 要 IAb…
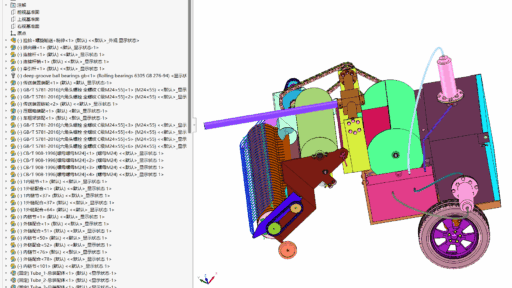
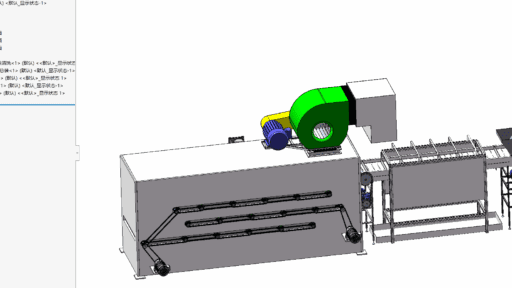
摘要 随着全球能源危机与环境保护意识的增强,可再生能源的开发与利用成为全球关注的焦点。芦苇作为一种广泛分布于湿地、湖泊等区域的非粮作物,因其生长周期短、产量高、适应性强等优势,在造纸、生物质燃料、饲料加工等领域展现出巨大的应用潜力。然而,芦苇原料的田间收集与加工处理仍面临诸多技术挑战。传统芦苇打包机多借鉴谷物收获机械的设计理念,未充分考虑芦苇茎秆细长、韧性高、易缠绕的物理特性,导致设备在捡拾、输送和粉碎环节效率低下,故障频发,严重制约了芦苇资源的规模化开发与利用。因此,针对芦苇原料特性,开展专用打包机核心功能模块的…
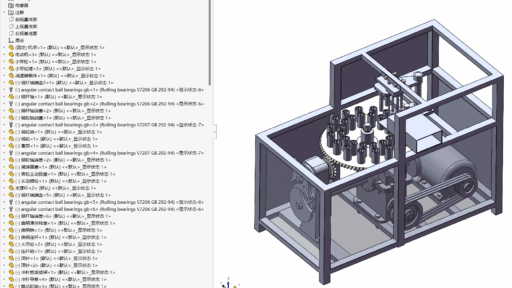
摘要 本文设计了一种联动红枣去核机,旨在提高红枣加工过程中的自动化水平和生产效率。通过对红枣去核机执行机构方案的深入研究,选择了对心曲柄滑块机构和槽轮机构作为核心执行机构,实现了冲针往复直线运动和旋转盘间歇转动的协调配合。同时,设计了合理的传动系统方案,确保了整个机械装置的运动精度和可靠性。基于ANSYS Workbench对红枣去核机的主要受载机构和机架进行了有限元仿真分析,验证了设计的合理性和可行性。结果表明,该联动红枣去核机结构紧凑、运动平稳、效率高,能够满足红枣加工企业的实际需求。本文的研究不仅提高了红枣去…
摘要 本文研究液压教学工作台液压系统的设计,旨在构建一个功能全面、操作简便的实验平台,满足液压传动课程的教学需求。通过三维建模与液压元件选型,确定了系统 总体结构及工作原理。详细计算了液压缸的主要参数,包括直径、活塞杆强度及推力拉力等,并据此选择了合适的液压泵、驱动电动机及其他液压元件。研究结果表明,所设计的液压系统能实现无级调速、平稳运行,并具备自动化控制功能。该系统为液压传动技术的教学和实践提供了有力支持。[关键词] 液压传动;系统设计;液压缸;液压泵;实验平台 目录 1 前言 41.1 液压传动特点 41.2…


