外文翻译 下载链接 支付 30.00 元,获取全部资料
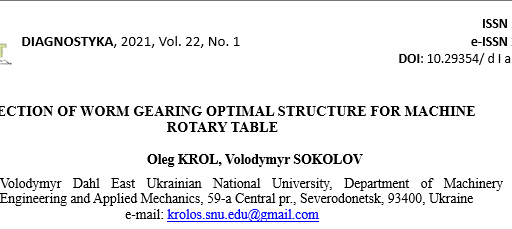
摘要 本文针对全自动旋转装载搬运机的结构设计与性能优化展开系统性研究,解决传统人工搬运效率低、精度不足及自动化水平有限等问题。研究以提升设备运行效率、定位精度和可靠性为目标,围绕旋转动力装置、联轴器补偿机构、旋转中心轴、升降气缸装置及蜗轮蜗杆传动系统等核心部件进行创新设计与分析。通过对比伺服电机、步进电机与直流电机的动态响应特性,最终选用闭环控制伺服电机。联轴器装置设计中,基于抗扭刚度的综合评估,采用聚氨酯材质梅花联轴器,有效解决了轴系安装偏差与动态振动问题。旋转中心轴结合精密加工工艺实现高负载工况下的旋转稳定性。…
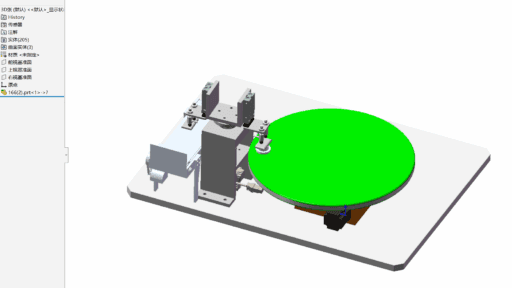
摘要 本文设计了一种新型带式运输机传动装置,旨在满足快递行业对高效、节能及高承载抗压能力的需求。装置由电机、减速机、联轴器、带传动、齿轮传动及轴传动等部件构成。通过深入分析行业现状及传统装置不足,确定了总体方案,并详细计算了关键部件参数。设计过程中,进行了结构设计与强度校核,配置了隔音罩与张紧装置,以降噪并保障运行稳定。此外,选用高强度合金钢材料,优化传动系统润滑与散热机制,提高了装置承载能力与能源利用效率。该新型传动装置的应用,可显著提升快递行业运输效率,降低运营成本,具有广泛的应用前景与推广价值。 关键词:新型…
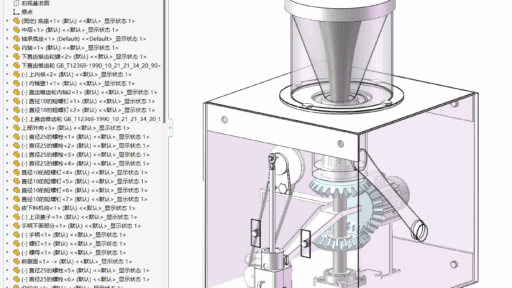
摘要 橙汁作为日常饮品,其生产过程中的技术问题一直备受关注。当前,市场上的主流榨汁设备为电动铰刀式,其工作原理依赖于电动机驱动,导致能源消耗较大,主要适用于大规模生产。对于家庭、食堂、餐馆等小型需求者而言,使用此类设备进行橙汁生产显然不经济,存在能源浪费的问题。此外,橙子的去皮过程亦耗时费力,目前尚未有广泛接受的小型去皮及榨汁机械。本研究旨在解决上述问题,首先对现有的橙子去皮技术进行了综述,对去皮机的类型、结构、特点及其局限性进行了详细分析。在此基础上,本研究借鉴了现有榨汁机的优点,并通过原始数据的深入分析、方案的…
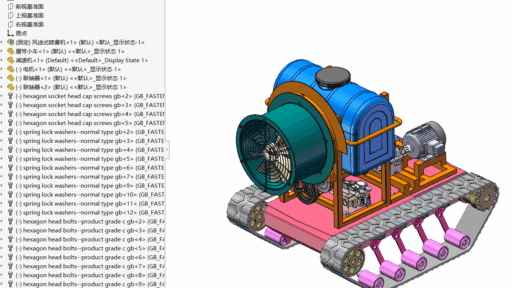
摘要 农业现代化进程推动苹果园管理向智能化、精准化方向发展。传统苹果园病虫害防治方式存在效率低下、劳动强度大且农药使用过量的问题,这对农产品安全和生态环境构成了威胁。为此,研发高效、精准的苹果园喷药机器人显得尤为重要。这一举措旨在提高农业生产效率,减少农药使用量,同时保护生态环境。本文聚焦于苹果园喷药机器人的结构设计。首先,分析了苹果园生长环境、病虫害发生规律及喷药需求,据此确定了喷药机器人的设计目标和性能要求。随后,对喷药机器人的整体结构进行了细致设计,涵盖行走机构、喷药系统、控制系统等核心部件。行走机构选用履带…
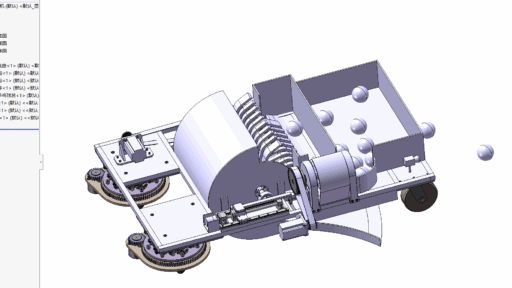
摘要 乒乓球捡运AGV是用于乒乓球体育运动中的自动捡球装置,主要用于乒乓球训练过程中代替人工进行捡球、运球,是一种自动化、高效率、智能化的设备。本文主要介绍了乒乓球捡运AGV的技术特点和国内外发展现状。根据其工作原理设计了基于视觉识别、激光雷达避障、智能路径规划的乒乓球捡运AGV设备,旨在满足乒乓球体育运动中实现对捡球动作的高效、精准需求。该AGV主要由底盘系统、悬挂系统、转向系统、动力系统、导引系统、捡(移)运装置、外壳等部件组成,具有结构紧凑、操作稳定、效率高的特点。其中,捡(收)运装置通过同步带传动和丝杠传动…
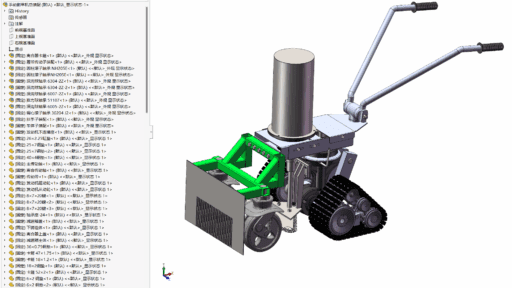
摘要 本文旨在设计一种适应山地环境的手动割草机,通过对比往复式、旋转式切割装置和轮胎式、履带式行走装置的优缺点,最终选择链条式切割装置和小型三角履带行走装置。研究方法包括理论分析、结构设计和有限元分析。研究结果确定了割草机的总体设计方案,完成了关键零部件的结构设计,并通过有限元分析验证了主承力件的结构可靠性。主要结论表明,所设计的手动割草机在复杂山地环境中表现出良好的适应性和稳定性,为割草机在山地环境的应用提供了有效方案。关键词:割草机;链条式切割;三角履带行走;有限元分析 目录 1 绪论 11.1 研究背景 11…
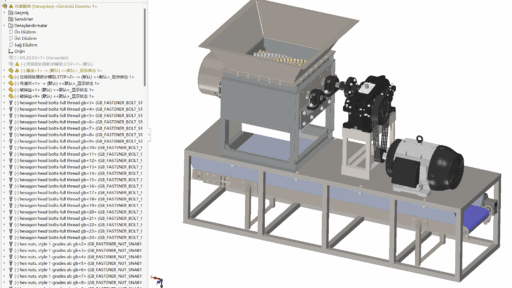
摘要 随着城市化进程的加快,垃圾产量迅速增加,农村生活垃圾处理问题日益突出。传统的垃圾填埋焚烧方法对环境造成了严重的污染和危害,如何高效、低成本地管理垃圾已成为一个重要课题。作为生活垃圾的重要组成部分,农村垃圾处理不当不仅占用了大量的垃圾处理设施,还可能造成恶臭等二次污染。如果皮、菜叶、剩菜等,农村生活垃圾中含有大量的有机物。如果这种垃圾未经处理排放到大气或水中,不仅会浪费生物资源,还会造成环境恶化和污染,对人类健康和生态环境产生不利影响。通过研究农村生活垃圾处理设备,可以帮助城市更好地分类、处理和处置垃圾,减轻垃…
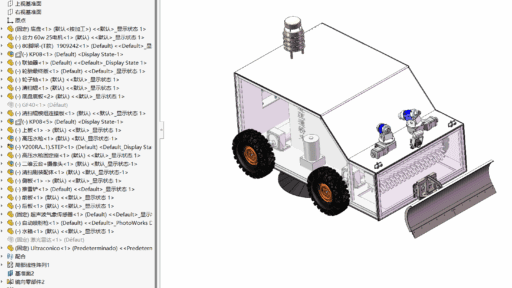
摘要 随着极端天气事件频发,城市排水系统面临严峻挑战,短时强降雨常导致排水口堵塞,引发内涝灾害。本文设计了一种短时强降雨天气下道路排水口清理机器人,旨在提高城市排水系统的应急处置能力。机器人集成推淤铲、清扫辊及清扫机构,采用四轮独立驱动系统,具备自主导航与避障功能,适应复杂路况。本文详细阐述了清理机器人的设计原理与实现过程。首先,通过分析国内外研究现状,明确了设计要求和关键技术。随后,提出了机器人的总体设计方案,包括推淤铲、清扫辊 及清扫机构的设计,并详细设计了四轮独立驱动系统。采用ANSYS Workbench对…


