本文针对机械设计制造及其自动化、智能制造工程专业毕业设计(论文)撰写需求,梳理了通用硬性要求与不同设计类型的差异化规范,明确万字以上正文、35 页以上篇幅、绪论占比不超 10% 等核心标准,以及结构设计类的图纸、计算校核工作量要求。同时详解机械类论文从绪论、总体方案设计、关键结构设计计算,到建模仿真 / 控制系统设计、结论的全框架撰写要点,为机械类本科生完成毕设论文提供清晰的实操框架与规范指引,助力把控工作量、规避返工风险。 正文部分 正文是论文的主体,旨在对本研究提出的问题进行逻辑严谨、探讨深入的分析与论证。一般…

机械专业的同学们,毕业设计的号角即将吹响!你是否还在为选题而迷茫?选题,绝不仅仅是填个题目那么简单,它是你未来几个月甚至半年的奋斗方向,直接关系到你的毕业成果、求职竞争力甚至读研方向。选得好,事半功倍;选得差,苦不堪言!这篇超详细指南,将手把手教你如何科学选题,看懂题目类型、要求与难度,迈出毕设成功的第一步! 一、选题流程 1.自我剖析: 兴趣点: 对机械的哪个子领域最感兴趣?(机器人?汽车?航空航天?精密仪器?智能制造?新能源?) 知识储备: 哪些专业课学得扎实?(力学、机械原理、机械设计、控制、材料、制…

摘要 本文围绕小型水面救援无人机结构及控制系统设计开展工程设计研究。针对近岸水域、湖泊水库、景区河道等视距范围内落水人员救援中人工响应速度慢、救援人员靠近危险区域风险高以及轻型救援物资难以及时投送等问题,提出一种基于X型四旋翼平台的小型水面救援无人机设计方案。该无人机主要用于视距范围内的低空飞行、稳定悬停和轻型救援物资投放,设计目标为机体尺寸约500 mm、最大救援载荷约0.5 kg、单次有效飞行时间约8~10 min。 在机械结构设计方面,本文完成了无人机总体布局、机臂、机身上下连接板、电机安装结构以及救援抛投装…
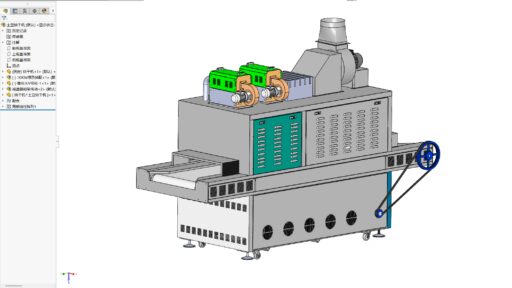
摘要 土豆作为全球重要的粮食作物,其深加工产业的发展受到烘干技术的制约。当前传统土豆烘干设备普遍存在烘干效率低、干制品品质不稳定、能耗较高、适配性不足等问题,难以满足中小型加工企业的连续化生产需求,也限制了土豆深加工产业的规模化发展。因此,开展高效、节能、实用的土豆烘干机设计研究,解决传统烘干技术的痛点,提升烘干装备的实用性与经济性,对推动土豆深加工产业升级、保障粮食资源高效利用具有重要的现实意义与应用价值。 本文围绕土豆烘干机设计展开系统研究,结合国内外土豆烘干技术研究现状,针对传统烘干方式的局限性,确定了适配中…
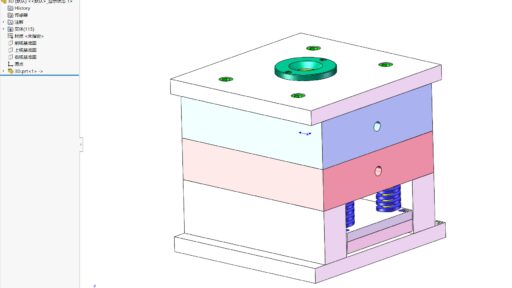
摘要 随着消费电子产业的快速发展,人机交互外设的市场需求持续攀升,鼠标作为核心外设之一,其外观质量、使用性能与成型效率成为市场竞争的关键。当前,鼠标外壳多采用注塑成型工艺批量生产,但由于其结构具有薄壁、曲面复杂等特点,在生产过程中易出现成型缺陷,模具设计水平直接制约着产品质量与生产效益,现有模具设计方案难以完全适配行业升级带来的高精度、高效率生产需求,因此开展鼠标外壳注塑模具设计研究具有重要的工程应用价值与现实意义。 本文围绕鼠标外壳注塑模具设计展开系统研究,结合塑件结构特征与材料特性,完成了塑件结构分析与材料选择…

摘要 随着智能穿戴技术的快速普及与全民健康意识不断提升,智能手环成为市场主流的便携健康监测设备,整体销量持续增长,与之配套的表带作为核心部件,需求量与品质要求同步提高。注塑成型是智能手环表带规模化生产的关键工艺,当前针对双色热塑性弹性体(TPE)软胶表带的注塑模具,普遍存在成型精度不足、塑件易翘曲变形、脱模困难、冷却与排气效果不佳等问题,难以满足穿戴产品高品质、高效率的生产需求。为适配智能穿戴产业对柔性塑件精密、高效成型的发展要求,开展智能手环双色 TPE 表带注塑模具设计,对提升表带成型质量、优化生产工艺、完善小…

摘要 模具工业是制造业规模化生产的核心支撑,注塑模具凭借成型效率高、适配批量生产等特点,成为塑料玩具制造的核心工艺装备。儿童玩具积木作为主流益智儿童产品,需严格符合无毒安全、耐冲击的使用标准,同时其拼接精度、结构稳定性对模具成型质量与设计合理性提出较高要求。随着玩具产业消费升级与智能制造发展,儿童积木注塑模具朝着高精度、高效率、经济型方向发展,当前国内相关模具设计在高端化、智能化应用上仍存在提升空间,开展适配儿童玩具积木的注塑模具设计,对满足玩具产业批量生产需求、推动模具技术国产化具有重要实践意义。 本研究围绕儿童…
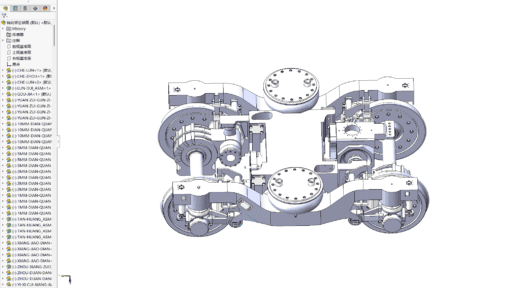
摘要 为适应城市轨道交通高速化与网络化发展趋势,弥补传统二维经验设计地铁转向架周期长、受力仿真不准、结构冗余的不足,本文以B型地铁转向架为研究对象开展建模与结构优化研究。转向架作为地铁车辆核心行走承载部件,其结构强度、轻量化水平与运行可靠性直接影响行车安全、乘坐舒适性与运营经济性,开展相关研究具有重要工程价值。 本文运用SolidWorks完成转向架构架、轮对、轴箱体等关键部件三维参数化建模,完成整机装配与空间干涉检测;借助ANSYS有限元软件进行模型简化、网格划分、材料参数设置及工况载荷约束施加,开展静强度分析并…

摘要 紧固装配是机械制造领域的基础核心工序,直接决定产品的结构稳定性与运行可靠性。随着通信与雷达技术的快速发展,天线单元组件呈现出小型化、集成化、精密化的发展趋势,其装配过程涉及大量微小规格螺钉的紧固作业,对扭矩精度、预紧力一致性及装配效率提出了严苛要求。传统人工紧固方式依赖操作人员经验,存在扭矩误差大、装配一致性差、效率低下等问题,难以满足批量生产需求。国外成熟设备价格昂贵且场景适配性不足,国内设备在微小螺钉精密装配等关键技术上仍存在短板,因此研发适配天线行业特点的辅助紧固装配系统具有重要的工程应用价值。 本文设…

摘要 着公众健康意识提升,家用果蔬榨汁机已成厨房必备。但主流产品存在机械性能不稳、人机交互欠佳等问题,难以满足高性能、智能化需求。未来需向多功能集成、轻量化、绿色化发展,探究结构改良方案以突破技术限制,改善性能,兼具社会效益与应用前景。 本文主要对家用果蔬榨汁机的结构优化途径展开研究,依据已有的设备功能上的不足之处,制定了系统化的开发目标和性能标准,而且根据家庭使用环境的要求设计出适应的工作模式和传动方式。经过精确的计算分析选择合适动力源,并做可行性评价;采用模块化设计法、测试法对核心部件进行设计测试,利用虚拟仿真…
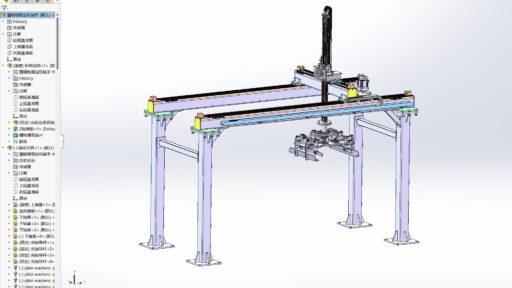
摘要 覆铜板作为电子信息产业的核心基础材料,其生产自动化水平直接影响下游电子制造的效率与产品质量。在覆铜板规模化生产流程中,板材搬运环节频繁且作业要求严苛,传统人工搬运及简易设备存在效率低下、易造成板材划伤破损、定位精度不足等问题,难以适配智能制造背景下覆铜板产业自动化升级的需求,成为制约生产效率提升的关键瓶颈。因此,研发一款适配覆铜板特性的专用自动化搬运机械手,对推动覆铜板生产向高效、精准、无损伤方向转型具有重要现实意义。 本文以覆铜板自动化搬运为核心目标,系统完成了搬运机械手的整体结构设计与关键技术研究。通过多…
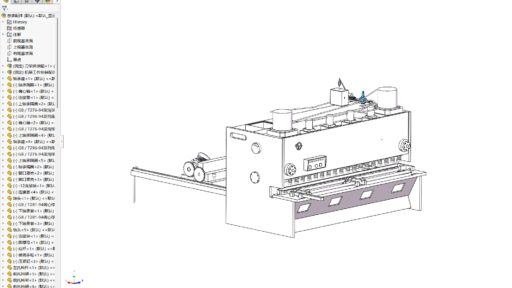
摘要 在现代制造业快速发展的背景下,金属板材作为航空航天、汽车制造等领域的核心基础材料,其加工精度与效率直接影响整机产品质量。剪板机作为板材冷加工的关键设备,承担着为后续工序提供合格坯料的重要任务。传统机械式剪板机存在冲击大、精度低、自动化适配性差等问题,而液压剪板机凭借动力稳定、调速灵活、易于自动化集成等优势,成为中大型板材剪切的主流设备。当前市场对板宽3000mm、板厚6mm中型板材的剪切需求日益迫切,但现有设备存在偏载影响精度、节能性不足等痛点,因此开展80kN剪切力液压剪板机的设计研究具有重要工程应用价值。…
