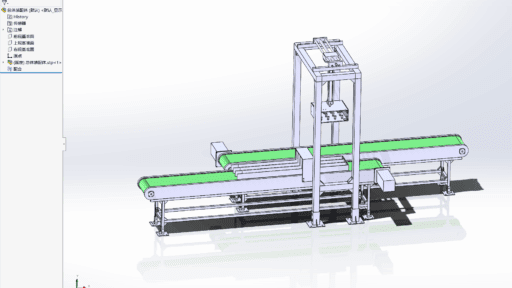
摘要 本设计以瓶装饮料装箱机构为研究主题,目的是设计并开发一种高效、自动化的装箱设备,以满足饮料生产线的快速装箱要求。首先,论文指明了研究的目的和意义,指出了在当前饮料行业快速发展背景下,自动化装箱机构对于提高生产效率、降低人工成本的作用。通过对国内外发展现状的研究,总结了现有装箱机构的优缺点,并提出了主要研究内容及关键问题。在总体方案设计阶段,明确了自动装箱装置的运动要求,确定了气动式机械手机械结构。进行了详细的结构设计与分析,包括吸盘系统、竖直气缸、横向气缸以及气泵的选择与配置。通过对各部件的原理、负载估算及选…
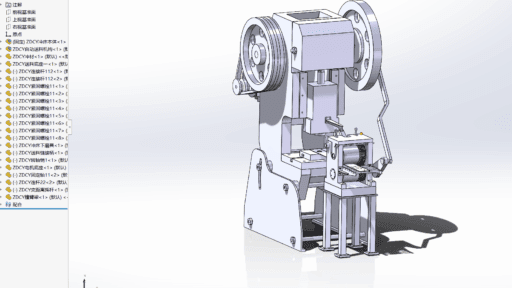
摘要 针对传统冲床送料效率低、定位精度不足的问题,本研究提出了一种自动下料冲床的优化机械结构设计方案。以辊轴式送料机构为核心,通过曲柄摇杆与曲柄滑块的复合驱动系统,实现送料动作与冲压行程的精确同步。设计中重点优化了上下辊轴直径匹配与压紧装置,采用板簧式柔性夹持与撞杆式抬辊机构,兼顾材料保护与送料稳定性;结合棘轮机构控制间歇送料节奏,并完成齿轮传动系统、轴系及轴承的强度校核,确保关键零部件的可靠性。此外,通过润滑系统优化与密封设计,显著提升了设备使用寿命与维护便捷性,形成了一套高效、稳定的自动化冲压解决方案。 研究成…
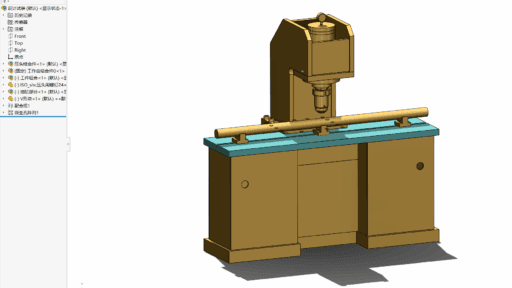
摘要 本次毕业设计围绕不锈钢管校直机的结构设计与优化展开,重点研究其校直机理、机械结构及液压系统集成方案。校直机主要由输送机构、校直执行机构、液压驱动系统及检测反馈单元组成。首先,基于弹塑性力学理论建立弯矩-曲率数学模型,分析钢管校直过程中的弹区比与压下量关系(误差控制≤0.1mm/m),推导校直力计算公式(最大载荷120kN);其次,对校直机主机结构进行模块化设计,通过有限元分析校核上横梁刚度(挠度<0.05mm)与强度(安全系数>3.5),优化立柱连接结构(螺栓预紧力偏差<5%);液压系统采用比例阀闭环控制(压…

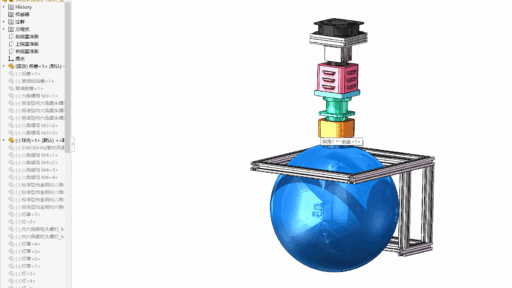
摘要 本研究针对新能源汽车电动后视镜系统的结构设计进行了深入研究。通过轻量化与高强度结构设计,采用聚碳酸酯基复合材料与碳纤维复合材料,结合拓扑优化技术,显著降低了整体重量并提升了抗冲击强度。同时,设计了高精度调节机构,利用双蜗轮蜗杆驱动与球形铰接螺杆联动,结合弹簧预紧与导向杆稳定结构,实现了镜片的多自由度微调,有效消除了传统机械间隙导致的抖动问题。此外,还集成了智能化温控系统,通过聚酰亚胺薄膜电热膜与PID闭环控制算法,实现了镜面温度的精准调控,显著提升了低温环境适应性。在传动系统与驱动优化方面,完成了关键部件的参…
摘要 固态照明技术的广泛应用对散热器性能提出了更高要求,其散热效率直接影响照明系统的可靠性与能效水平。本研究针对大功率LED照明场景下的热管理难题,通过多尺度热力学分析与结构创新设计,提出了一套分层优化散热器解决方案。研究以热传导路径优化为核心,结合对流换热强化策略,构建了“基础导热层-中间扩散层-外部对流层”三级散热架构,重点突破界面热阻控制、流体边界层扰动及空间利用率提升等关键技术。通过数值模拟与实验验证,系统研究了翅片几何参数、材料热导率及气流组织对散热性能的影响规律,开发了基于仿生学原理的复合型散热结构。设…
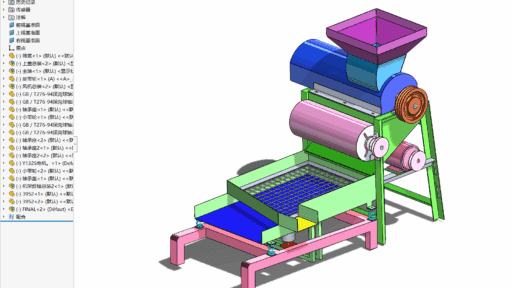
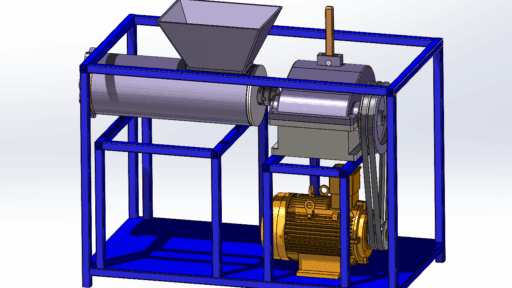
摘要 我国长期以来一直是农业大国,而玉米作为国内三大主要粮食作物之一,其年种植面积大约有3.67亿亩。然而,随着大量农村劳动力涌向城市,推动农业机械化的重要性也日益凸显。使用玉米脱粒机不仅可以提高劳动生产率和粮食单产,还能大大降低生产成本。因此,研究玉米脱粒机并推进玉米生产种植的机械化,对我国农业发展具有重要的意义。玉米脱粒机的主要结构包括动力装置、脱粒体、筛体和带传动装置等。其工作原理是模拟揉搓的动作,使玉米穗在脱粒体和筛体之间运动进行脱粒。在脱粒完成后,玉米粒会从筛体的缝隙中落下,而玉米杆则会通过排料口进行排出…
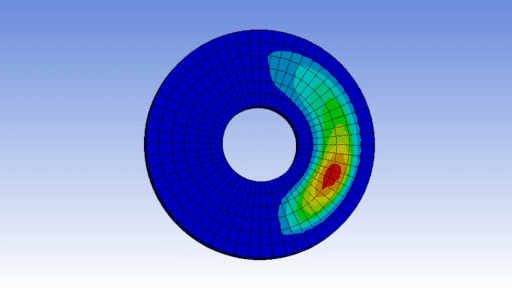
摘要 本毕业设计基于ANSYS Workbench平台,对盘式制动器进行了热结构耦合分析。盘式制动器作为汽车制动系统的重要组成部分,其性能直接关系到车辆行驶的安全性。因此,对制动器在制动过程中的热结构行为进行深入研究,具有重要的理论意义和实际应用价值。本研究通过文献综述和理论分析,详细阐述了接触分析理论、摩擦生热理论以及热力学理论在制动器热结构耦合分析中的应用。接着,建立了盘式制动器的三维模型,并利用Workbench平台进行了前处理,包括材料属性定义、网格划分、边界条件与载荷施加等。在此基础上,本研究利用有限元方…
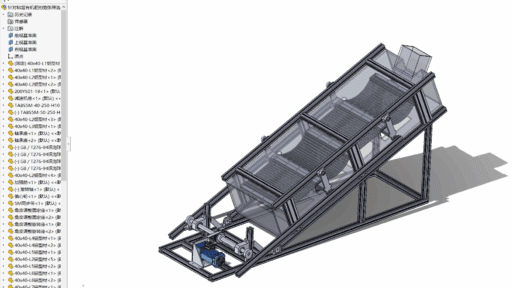
摘要 在处理含有大量水分并易于黏结的有机肥料颗粒时,这些颗粒间的高水分含量会导致颗粒间形成紧密的粘性聚集体,这种现象会直接导致筛网孔径被堵塞。筛网孔被堵塞不仅会显著降低筛分过程的效率,还会极大地影响最终产品的质量与产出量。本课题设计一款针对粘湿有机肥的弛张筛,通过筛网的松弛与紧张运动,持续地对粘湿有机肥湿颗粒抛掷至空中并下落至筛网,从而使粘湿颗粒解聚并透筛。这种方式不仅显著提升了粘湿有机肥筛选效能,更有效减少了由粘湿有机肥黏着引发的筛网阻塞状况,大幅增强了生产工序的稳定性与经济效益。本课题完成的主要工作有:基于对各…
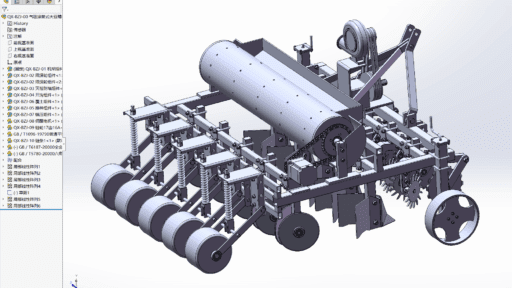
摘要 随着农业机械化与精准化技术的快速发展,气吸式大豆精密排种器作为现代播种装备的核心部件,其性能直接影响大豆种植效率与产量。传统机械式排种器存在重播率高、种子破损严重等问题,难以满足高速作业与精准播种需求。本研究针对大豆种子物理特性与农艺要求,结合气吸力学原理与机电一体化技术,提出一种新型气吸式精密排种器设计方案。通过构建负压吸附动力学模型,优化吸孔结构与滚筒参数,开发电磁振动清种与真空度自适应调控系统,显著提升单粒吸附稳定性。仿真分析与田间试验表明,该排种器在复杂工况下可实现高精度播种,为空穴率与重播率的协同控…
摘要 本文主要探讨了绞肉机结构设计的研究背景、现状、目的、意义以及研究内容。首先,介绍了绞肉机结构设计的重要性,特别是在食品加工行业中的应用。接着,对当前绞肉机结构设计的研究现状进行了概述,包括手动和电动绞肉机的发展现状。然后,阐述了本课题的研究目的、意义和研究内容,旨在设计一款高效、安全、易于操作的绞肉机。在总体方案设计中,详细介绍了送料机构、切割机构和驱动机构的设计思路和原理。同时,阐述了绞肉机的工作原理,为后续的设计提供理论支持。在螺旋供料器设计中,重点考虑了绞笼和绞筒的设计,包括材料选择、螺旋直径、转速、螺…


