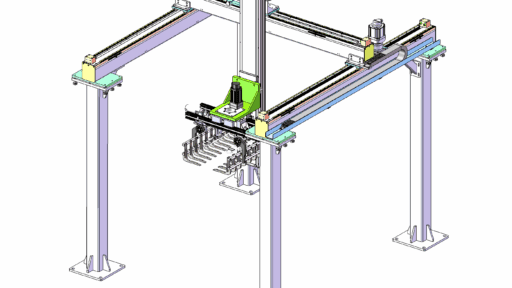
摘要 本文对面粉机械手手爪的设计进行了深入而全面的研究。文章首先从总体方案设计出发,通过对比多种可能的方案,最终确定了末端执行器的具体结构,这包括手爪的类型、夹紧装置的结构、手部手指的设计以及袋料抓手的压架设计等关键部分。同时,文章还对袋料抓手的驱动方案、电气控制方案以及运行方案进行了详尽的比较与分析,并最终确定了最优方案。在设计计算部分,文章对驱动机械手的气压缸、压架的气压缸推力、连接杆的尺寸以及手指部分的弯曲强度等进行了严格的校核,确保了设计的合理性与可靠性。通过本次设计,成功开发出了一种结构紧凑、操作简便且夹…

摘要 在现代机械加工产业中,机器代替人工需求逐渐明显。所以,本文选题意在研究工业机器臂的结构设计问题。将从机械设计、传动方式、结构设计等多个方面入手,系统地分析和研究工业机器人机械臂的设计原理和方法。主要研究内容包括:通过了解工业机器人机械臂结构设计的最新研究动态,工业机器人的用途工作条件等,选择合适的电机型号,以所选机械臂型号参数为基础,分析机械臂结构特点,确定总体设计方案机械臂结构总体设计与分析,包括机械臂的参数确定以及机械臂的自由度。然后,将讨论机械臂的传动构件结构设计还有电机的选用与工作空间分析。在机械臂结…
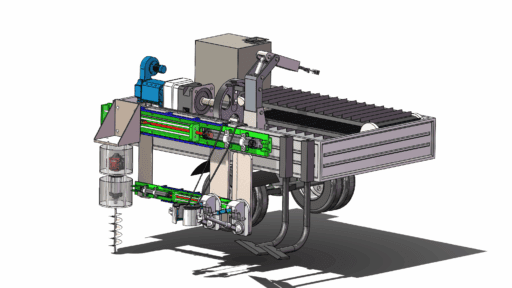
摘要 近年随着我国城市绿色生态的发展,增加沙漠绿化树的拥有量将有助于改善沙漠生态环境,目前沙漠绿化工作多采用人工移植树木的方式,其劳动强度大、效率低、成活率也不高。同时就目前而言,劳动力市场也不容乐观,农民工从体力劳动到技术劳动的转型,导致纯体力劳动成本迅速增加和短缺,为此,机械化沙漠绿化成为今后的发展趋势,实现林业工程的自动化势在必行。来,人们越来越重视身边的生态环境,“植树造林,保护环境”已成为全民参与的一项大型义务活动。然而,人工造林效率低、速度慢且劳动强度大,而机械化造林则是大势所趋,不仅可以提高劳动效率、…
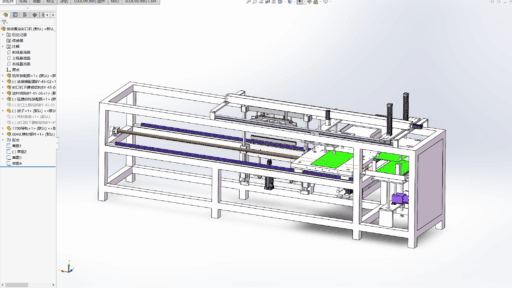
摘要 伴随着新经济环境的蓬勃发展和城镇化建设的持续推进,以及公众生活水平的不断提高,包装工业迎来了飞速发展的黄金时期,获得了宝贵的发展契机[1]。这一快速发展势头也为日用品包装产业带来了强有力的支撑。根据相关机构的统计数据显示,从2013年至2017年,包装与食品行业的产出规模有望突破6000亿元大关,且年均增长率保持在16%的高位[2]。然而,我国食品及包装机械产业在发展过程中,存在着对国外技术过度依赖的问题,这给行业的稳定与持续发展带来了一定的负面影响。当前,国内包装产业在境外技术方面的过高依赖性,已成为制约其…
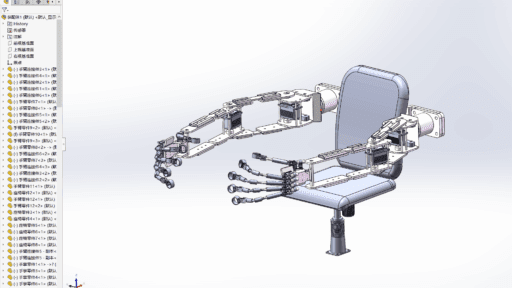
摘要 伴随着人民生活水平的提高和科技进步,我国和世界上的许多国家一样,正逐渐步入老龄化,而在老龄人群之中有大量的脑血管疾病和神经系统疾病患者,这类患者多数会伴有偏瘫症状。与此同时,由于交通运输工具的迅速增长,因为交通事故而导致神经性损伤或者是肢体损伤的人数也在呈现上升的趋势。第二次抽样调查统计的结果显示,我国各类残疾人总数已达到8200万之多,占据全国总人口的6.34%。残疾人的总数与1987年中国进行第一次抽查时相比,已增加了3000多万,其中肢体残疾人数超过2412万。此外,由中风引起的残疾人数近年来也呈现上升…
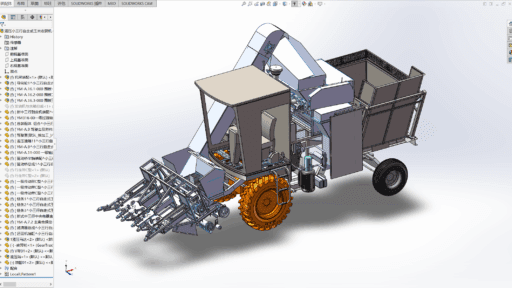
摘要 玉米作为全球重要的粮食与饲料作物,其规模化种植对机械化收获技术提出了更高要求。传统玉米切割设备多依赖电机或内燃机驱动,存在结构复杂、能耗高、田间适应性差等问题,尤其在潮湿或泥泞地块易出现动力传输失效。液压驱动技术凭借功率密度高、过载保护能力强、布局灵活等优势,在农业机械领域展现出显著应用潜力,但其在玉米切割机中的集成设计尚处于探索阶段。现有研究多聚焦于液压系统参数优化或单一部件改进,缺乏针对整机结构与液压系统协同设计的系统性研究,导致设备在复杂工况下存在切割效率波动大、能耗控制不足等瓶颈。因此,开展液压驱动玉…
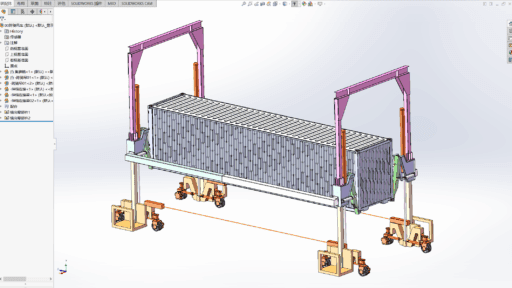
摘要 随着全球经济一体化进程的加速,国际贸易活动日益频繁,港口作为连接国内外市场的重要枢纽,其货物吞吐量持续增长。20世纪中后期以来,跨国贸易规模不断扩大,对港口物流的高效运作提出了更为严苛的要求。集装箱运输作为一种标准化、高效化的货物运输方式,已成为现代国际贸易运输的主流模式。然而,随着集装箱运输量的急剧增加,传统的人工装卸和简单的机械装卸方式已难以满足港口快速、高效处理大量集装箱的需求。因此,研发和应用先进的集装箱装卸设备,实现集装箱运输的自动化、智能化和高效化,成为全球港口物流领域亟待解决的重要课题。本文设计…
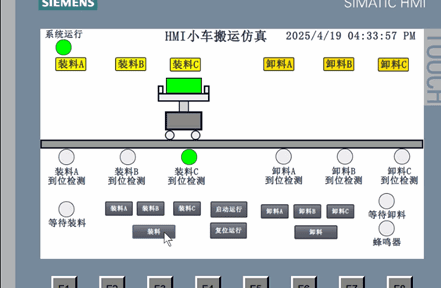
摘要 随着全球经济的蓬勃发展和智能制造的持续推进,智能物流系统在工业生产及物流仓储领域的应用日益广泛。然而,传统的人工搬运和叉车搬运方式已难以满足现代工业对高效率、高精度及安全性的需求。在此背景下,智能化搬运小车作为一种集传感器技术、导航算法与控制系统于一体的自动化设备,正逐渐成为解决物料搬运难题的关键技术。本文聚焦于工厂搬运AGV小车及其控制系统的设计与实现,重点研究了小车的总体结构设计、驱动系统设计、控制系统设计及人机界面(HMI)设计。在结构设计方面,本文分析了不同轮系布局的优缺点,最终选定了适应复杂工厂环境…
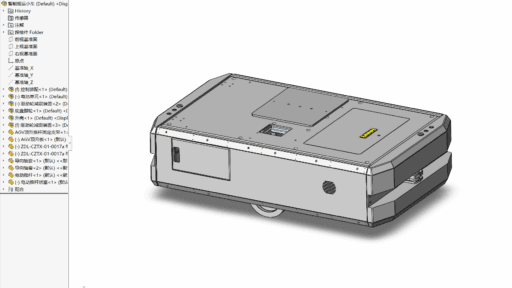
摘要 随着工业自动化和智能制造的快速发展,传统的人工搬运方式已难以满足现代工厂高效、精准的生产需求。特别是在自行车轮胎搬运这一环节,由于轮胎体积大、重量重,且搬运过程中需要避免损坏,传统的人工搬运方式不仅效率低下,还存在安全隐患。因此,设计一款能够自动搬运自行车轮胎的智能小车,对于提升工厂生产效率、降低劳动强度具有重要意义。本文主要研究了一款应用于智能工厂中的自动化自行车轮胎搬运小车的设计。首先,对智能小车的整体结构进行了设计,包括车体框架、驱动系统、顶升装置等关键部件。其中,顶升装置采用了电动推杆带动升降工作台的…
摘要 本研究对立式数控铣床的基本概况进行了阐述,并对机床主传动系统的原理及其类型进行了简要说明,同时对各种传动方案的机制进行了深入分析。立式铣床主传动系统由主轴电动机、主轴传动系统以及主轴组件三个核心部分构成。本研究详细探讨了立式铣床主传动系统的设计流程,指出该立式铣床主轴变速箱主要通过齿轮传动实现,主轴箱传动系统亦采用齿轮传动,传动方式为集中式,而主轴变速系统则采用多联滑移齿轮变速。齿轮传动因其高传动效率、紧凑结构、可靠性强、寿命长以及传动比精确等优势而被广泛采用。本研究还对立式铣床主传动系统中不同传动方案的优劣…


