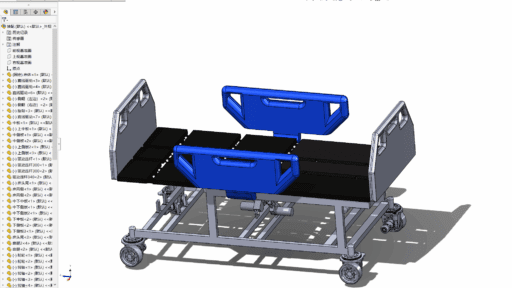
摘要 随着我国老龄化进程的加速,老年人口和残疾人群体的护理需求日益增长,传统的人工护理方式已难以满足高效、便捷的护理需求。床椅一体化机器人作为一种集护理床与轮椅功能于一体的智能设备,正逐渐成为解决这一问题的关键。此类机器人不仅能够辅助老年人及残疾人士完成起床、如厕、移动等基本日常活动,还能有效减轻护理人员的负担,提高护理效率和质量。然而,目前市面上的床椅机器人普遍存在功能单一、造价高昂、用户体验不佳等问题。因此,开展对床椅机器人结构设计的深入研究,设计一款性价比高、功能全面、用户体验良好的床椅一体化机器人,具有重要…
摘要 在汽车保有量持续攀升的当下,传统人工洗车由于效率低下、成本高昂且清洗质量参差不齐,已难以满足日益增长的市场需求。在此背景下,开发高效、智能的汽车自动清洗控制系统成为行业发展的关键。首先,对系统功能进行全面且细致的需求分析。通过采用对射式光电传感器、漫反射式光电传感器等,实现精准的车辆检测,包括车辆的进入、离开以及位置和尺寸的确定。为满足不同用户需求,系统设置了预洗、泡沫清洗、清水冲洗、擦干等多种清洗方式,用户可依据实际情况自由选择。在清洗过程中,借助PLC强大的逻辑控制能力,实现全过程自动化,从电机的有序启停…
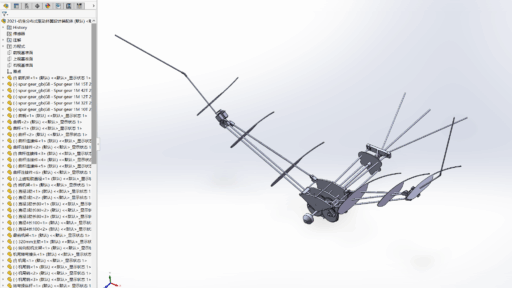
摘要 随着农业、林业及航空等领域的快速发展,鸟类活动对这些领域的安全与效率构成了日益严峻的挑战。鸟类在农田中啄食作物、在机场附近飞行干扰航班正常起降、在林木中筑巢损坏树木等,不仅造成了经济损失,还可能引发安全事故。传统的驱鸟方法,如人工驱赶、声音恐吓、化学药剂等,存在效果有限、成本高昂或环境不友好等问题。因此,开发一种高效、环保、智能的仿生驱鸟装置显得尤为重要。仿生技术通过模仿自然界的生物特性,为解决这一问题提供了新的思路和方法。本研究正是在此背景下,旨在设计一种基于仿生原理的驱鸟装置,以有效减少鸟类对特定区域的干…
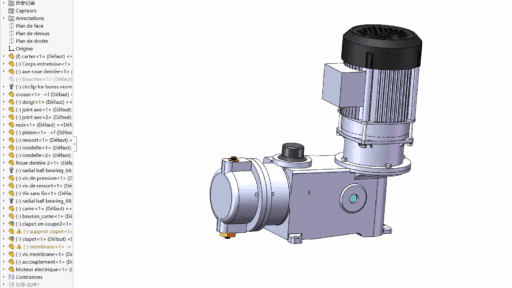
摘要 变量隔膜泵作为一种高效、无泄漏的流体输送设备,广泛应用于化工、制药及环保等领域。然而,隔膜与密封结构作为其核心部件,长期面临疲劳失效、介质泄漏等问题,直接影响泵的可靠性与寿命。本文以提升隔膜使用寿命为目标,从隔膜工况分析、结构设计优化、密封与缓冲系统改进以及驱动机构创新等方面展开研究。通过理论分析、有限元仿真(ANSYS)与实验验证,系统探讨了隔膜在动态载荷下的应力分布规律,提出了基于弹性薄壳无矩理论的预变形隔膜设计方法,并结合多层复合结构与波纹形内表面增强其抗疲劳与自补偿能力。此外,引入弹簧缓冲结构(碟形弹…
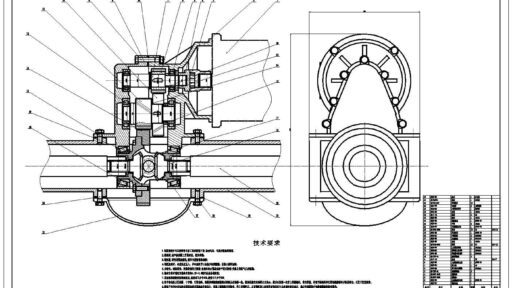
摘要 随着全球对环境保护意识的增强和能源结构的转型,新能源汽车产业得到了快速发展。新能源汽车减速器作为连接驱动电机与车轮的关键部件,其性能直接影响了整车的动力传递效率、续航里程以及驾驶舒适度。在电动汽车动力性能不断提升的背景下,减速器所承受的转速和载荷也在不断增大,对其设计提出了更为严苛的挑战。因此,对新能源汽车减速器的设计进行深入研究,不仅是提升车辆性能的关键,也是推动新能源汽车产业持续发展的重要一环本文聚焦于新能源汽车减速器的设计,首先介绍了减速器在新能源汽车中的核心作用及其基础参数设置。随后,详细剖析了减速器…
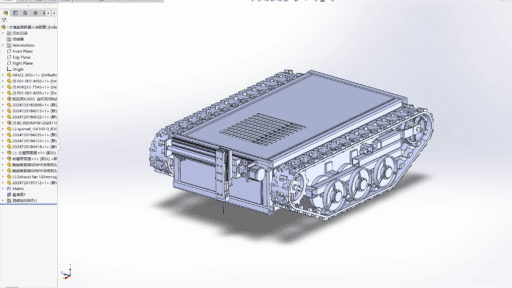
摘要 随着现代农业和环境保护的快速发展,土壤环境监测在农业生产、生态修复和污染治理等领域的重要性日益凸显。传统的土壤监测方法通常依赖于人工采样和实验室分析,存在效率低、成本高、实时性差等问题,难以满足大范围、高精度的监测需求。因此,开发一种能够自主完成土壤环境监测的机器人系统具有重要的现实意义。本文旨在设计一种高效、智能的土壤环境监测机器人,通过集成先进的传感技术、移动平台和数据分析算法,实现对土壤参数(如湿度、温度、pH值、养分含量等)的实时监测与分析,为精准农业和环境保护提供技术支持。本文基于土壤环境监测的需求…
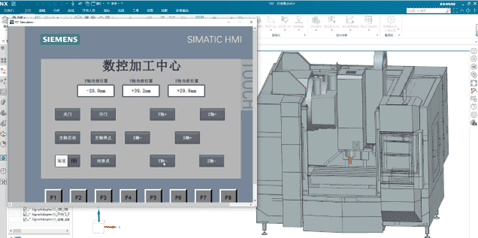
摘要 随着智能制造技术的快速发展,数控加工中心作为现代制造业的关键设备,其性能与效率直接影响着生产质量和成本。然而,传统数控加工中心在运行过程中面临着诸多挑战,如加工精度难以保证、故障预测能力不足、生产效率低下等。数字孪生技术的出现,为数控加工中心的智能化升级提供了新的解决方案。该技术通过构建物理设备的虚拟镜像,实现实时监测、仿真分析和优化控制,有效提高了设备的运行效率和可靠性。本文主要研究数控加工中心数字孪生技术的设计与实现。首先,分析了数控加工中心的工作原理和运行特点,明确了数字孪生技术在其中的应用需求。接着,…
摘要 随着工业化进程加速和城市化规模扩张,空气污染已成为全球性环境问题。传统空气过滤器存在滤芯易堵塞、维护频率高、使用寿命短等缺陷,尤其在粉尘浓度较高的工业环境中,频繁更换滤芯不仅增加运维成本,还会导致二次污染。自清洁式空气过滤器通过集成清洁再生功能,可实现滤材的周期性清洁与重复使用,成为解决上述问题的有效技术路径。现有研究多聚焦于单一清洁方式优化,在结构集成度、能耗控制与长期稳定性方面仍存在显著不足。本文针对当前自清洁过滤装置存在的结构冗余、清洁效率衰减等问题,开展系统性结构设计与优化研究,旨在构建高效节能、稳定…
摘要 在全球能源结构转型与“双碳”目标驱动下,风电作为可再生能源的重要组成部分,其装机规模持续扩大,单机容量不断向大型化、海上化发展。液压变桨系统作为风电机组的核心控制部件,承担着调节叶片攻角、控制机组载荷与保障安全运行的关键任务。然而,风电设备长期运行于高风速、强振动、温差大等复杂工况下,液压系统易出现泄漏、磨损、响应滞后等问题,直接影响发电效率与设备寿命。本文聚焦风电液压变桨系统的性能测试需求,设计了一种便携式、模块化的集成测试设备。该设备以嵌入式控制系统为核心,集成了高精度压力传感器、流量计、温度传感器及振动…
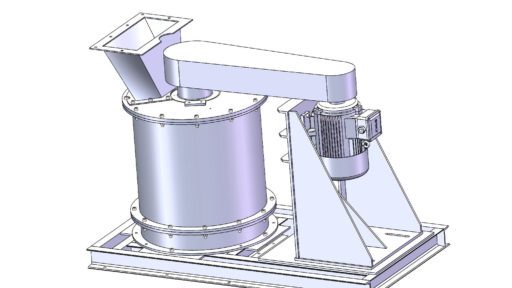
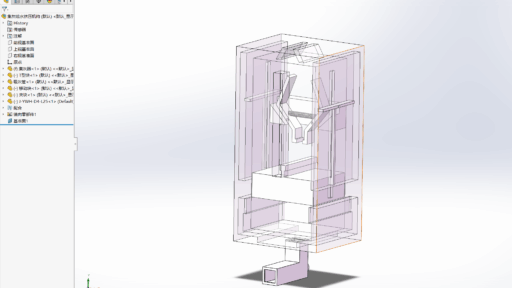
摘要 随着全球对环境保护和可持续发展的重视,废弃纸张的回收利用成为了一个日益重要的话题。废纸作为城市中的森林资源,其有效利用对于缓解造纸原料供应不足、减轻环境污染、降低能源消耗以及保护生态平衡具有重要意义。近年来,废纸利用率不断上升,废纸制浆技术也得到了飞速的发展。碎浆作为废纸处理技术中的第一道工序,是废纸再利用的关键环节。传统的碎浆机在操作过程中存在工人需过度靠近搅拌槽槽口、操作不便且存在一定安全隐患等问题。因此,设计一种高效、安全、便捷的废弃纸张打浆机,以提高废纸回收利用的效率和安全性,成为当前造纸工业亟待解决…


