摘要 蓝莓为杜鹃花科,越橘属植物,其具有防止脑神经老化、保护视力和增强人机体免疫力等功效,是世界粮农组织推荐的五大健康水果之一。由于蓝莓具有较高的药用价值与经 济价值,使蓝莓的种植面积不断增加,蓝莓的主要采摘方式基本上是传统的人工采摘,采摘难度大。目前,我国的蓝莓采摘机械处于研发与设计阶段。本文致力于小型蓝莓采摘机械的结构设计研究。首先对蓝莓的生长特性和采摘要求进行深入分析,明确了小型采摘机械需具备的功能特点。设计的小型蓝莓采摘机械主要由采摘机构、输送机构和收集装置组成。采摘执行机构采用巧妙的机械结构,能够精准地识…
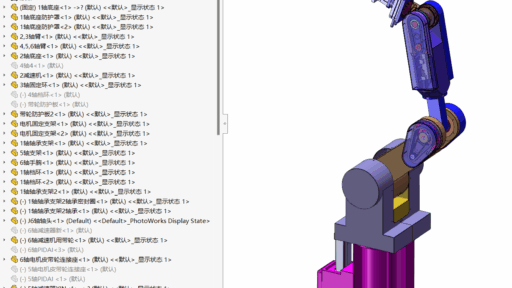
摘要 本文研究了一种小型棒料分拣机械手的设计。研究目的是提高生产自动化程度,降低人力成本,改善劳动条件。研究方法包括广泛查阅相关理论知识,制定工艺文件,应用CAD/CAE/CAM技术进行设计,完成机械手的结构设计、载荷计算和 部件选型。研究结果为设计了一款六自由度的小型棒料分拣机械手,采用电-气复合驱动方式,通过电机驱动旋转和摆臂动作,气压驱动手指夹取工件。机械手由手指、手腕、手臂、机身和底座组成,满足实际生产需求。主要结论是该机械手设计合理,各部件选型恰当,能够在生产线上实现棒料的自动分拣,提高生产效率,降低劳动…
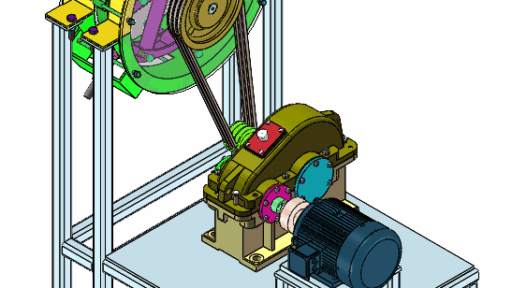
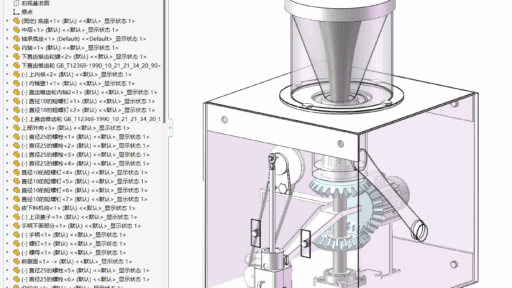
摘要 本文旨在设计一种高效、低损的小型核桃去壳机,以解决传统人工破壳效率低、损伤率高的问题。通过分析核桃的物理特性及现有去壳机械的不足,提出了采用挤压式破壳方案,并确定减速电机直接驱动的动力源。研究方法包括文献综述、方案设计、理论计算与结构设计。设计过程中,对传动系统、主要零件及关键 部件进行了详细设计与计算,包括齿轮传动、传动轴、上壳体、下壳体、运料装置、击打装置及凸轮结构等。研究结果表明,所设计的核桃去壳机破壳率可达95.2%,整仁率超过90%,较传统设备效率提升30%以上。主要结论是该设备能有效提高核桃加工效…
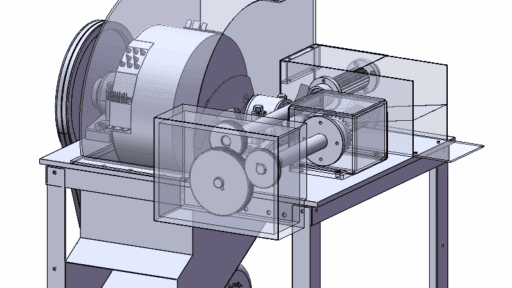
摘要 本毕业设计的核心任务是实现一款农业用途的小型饲料破碎机的全面传动设计以及部分结构设计。设计流程的起点是对饲料破碎机的构造组成、加工方式、特点及其在农业机械领域的适用性进行详细阐述。探讨该破碎机的当前研究进展和潜在的发展方向。在深入分析相关数据、阐释传动机制并筛选出合适的设计方案后,将依据既定的设计标准和计算选择的基本原则,结合特定的技术参数,进行详尽的设计和计算工作。主要包括破碎机的整体设计、电机的选择以及传动系统的构建。此外,本设计还涉及主轴结构尺寸的规划以及对主要零部件进行校验和核实。最终,设计工作将扩展…
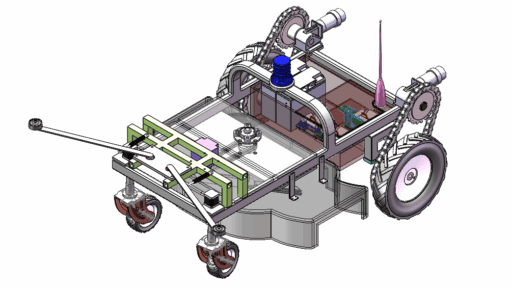
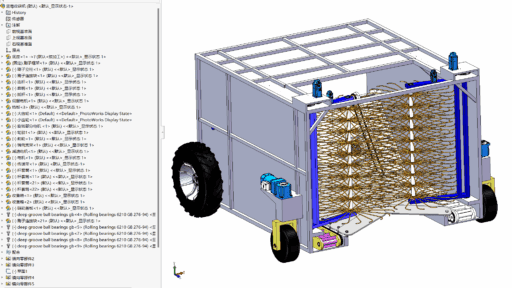
摘要 随着果园现代化管理进程加速的背景下,传统人工除草方式暴露出效率低下、成本高昂的弊端,难以满足规模化果园的生产需求。与此同时,国内现有的除草机械因果园种植模式日趋多样化,存在作业适配性不足、效果欠佳等问题,基于上述现实需求,本文设计了一款果园杂草清理机器人。该机器人聚焦果园行间与株间杂草的精准割断作业,在功能设计上,机器人配备机械式触碰避障杆,可灵敏检测树干位置,并联动避障装置及时调整作业路径,有效规避碰撞风险,保障果园树木安全。通过实际测试验证,该果园杂草清理机器人展现出优异的作业性能,提升平均作业效率,显著…
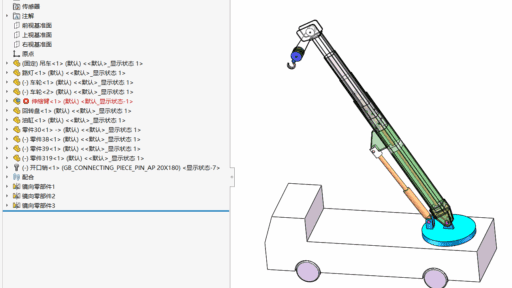
摘要 汽车起重机作为一种重要的工程机械,广泛应用于建筑、物流、救援等领域。主臂作为汽车起重机的核心部件,其设计直接影响到整机的性能、安全性和工作效率。本文针对汽车起重机主臂的设计进行了深入研究,主要研究内容包括以下几个方面:首先,分析了汽车起重机主臂的结构形式和工作原理,探讨了主臂在起重作业中的受力特点,包括轴向力、弯矩、剪切力等。基于此,提出了主臂设计的基本要求和设计准则,确保主臂在满足强度、刚度和稳定性的同时,尽可能减轻重量,提高整机的经济性和机动性。其次,采用有限元分析方法对主臂进行了静力学和动力学仿真,模拟…
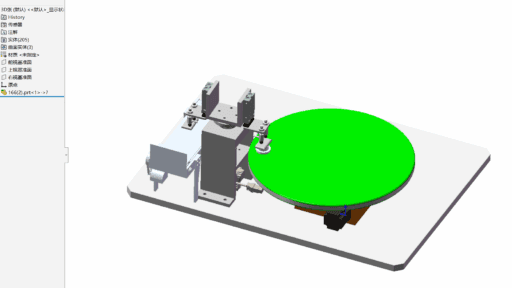
摘要 本文针对全自动旋转装载搬运机的结构设计与性能优化展开系统性研究,解决传统人工搬运效率低、精度不足及自动化水平有限等问题。研究以提升设备运行效率、定位精度和可靠性为目标,围绕旋转动力装置、联轴器补偿机构、旋转中心轴、升降气缸装置及蜗轮蜗杆传动系统等核心部件进行创新设计与分析。通过对比伺服电机、步进电机与直流电机的动态响应特性,最终选用闭环控制伺服电机。联轴器装置设计中,基于抗扭刚度的综合评估,采用聚氨酯材质梅花联轴器,有效解决了轴系安装偏差与动态振动问题。旋转中心轴结合精密加工工艺实现高负载工况下的旋转稳定性。…
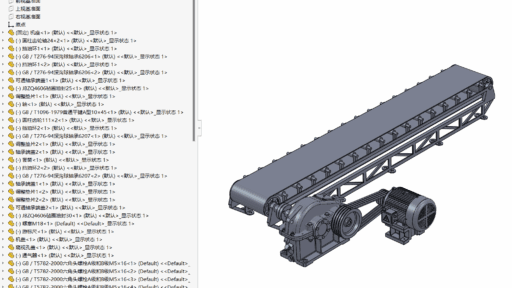
摘要 本文设计了一种新型带式运输机传动装置,旨在满足快递行业对高效、节能及高承载抗压能力的需求。装置由电机、减速机、联轴器、带传动、齿轮传动及轴传动等部件构成。通过深入分析行业现状及传统装置不足,确定了总体方案,并详细计算了关键部件参数。设计过程中,进行了结构设计与强度校核,配置了隔音罩与张紧装置,以降噪并保障运行稳定。此外,选用高强度合金钢材料,优化传动系统润滑与散热机制,提高了装置承载能力与能源利用效率。该新型传动装置的应用,可显著提升快递行业运输效率,降低运营成本,具有广泛的应用前景与推广价值。 关键词:新型…
摘要 橙汁作为日常饮品,其生产过程中的技术问题一直备受关注。当前,市场上的主流榨汁设备为电动铰刀式,其工作原理依赖于电动机驱动,导致能源消耗较大,主要适用于大规模生产。对于家庭、食堂、餐馆等小型需求者而言,使用此类设备进行橙汁生产显然不经济,存在能源浪费的问题。此外,橙子的去皮过程亦耗时费力,目前尚未有广泛接受的小型去皮及榨汁机械。本研究旨在解决上述问题,首先对现有的橙子去皮技术进行了综述,对去皮机的类型、结构、特点及其局限性进行了详细分析。在此基础上,本研究借鉴了现有榨汁机的优点,并通过原始数据的深入分析、方案的…
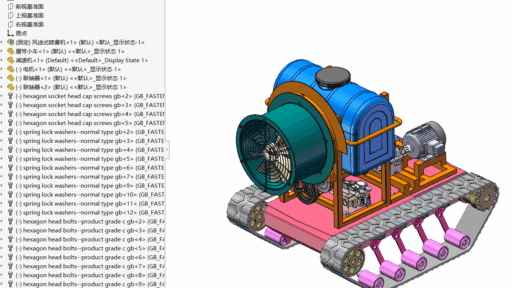
摘要 农业现代化进程推动苹果园管理向智能化、精准化方向发展。传统苹果园病虫害防治方式存在效率低下、劳动强度大且农药使用过量的问题,这对农产品安全和生态环境构成了威胁。为此,研发高效、精准的苹果园喷药机器人显得尤为重要。这一举措旨在提高农业生产效率,减少农药使用量,同时保护生态环境。本文聚焦于苹果园喷药机器人的结构设计。首先,分析了苹果园生长环境、病虫害发生规律及喷药需求,据此确定了喷药机器人的设计目标和性能要求。随后,对喷药机器人的整体结构进行了细致设计,涵盖行走机构、喷药系统、控制系统等核心部件。行走机构选用履带…


