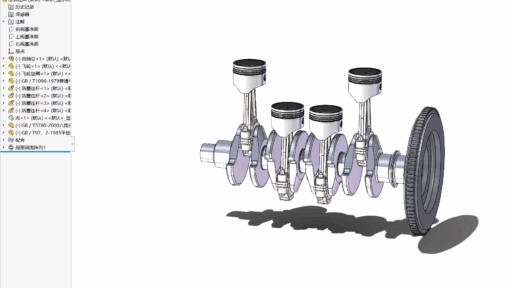
摘要 曲柄连杆机构作为汽车发动机的核心运动组件,其结构设计与动力学特性直接影响着发动机的动力输出、燃油经济性及可靠性。随着内燃机高效化与混合动力技术的发展,传统曲柄连杆系统面临轻量化设计、高爆压承载、动态应力优化等关键技术挑战。本文以四缸直列发动机为研究对象,针对曲柄连杆机构的疲劳失效、振动噪声及摩擦损耗等问题,开展系统性结构设计与多学科仿真分析,旨在构建具有高功率密度与长寿命周期的曲柄连杆系统优化方案。研究基于运动学与动力学理论,建立了曲轴-连杆-活塞多体系统力学模型,解析了气体爆发压力与惯性载荷的耦合作用规律。…
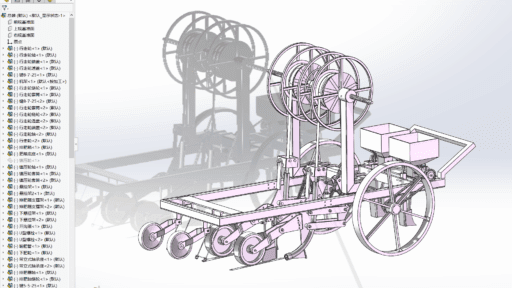
摘要 本文设计了一种适用于密植作物的小型滴灌带铺设装置,旨在解决传统铺设设备作业效率低、适应性差及滴灌带损伤率高的问题。设备采用三点悬挂式机架,适配15-30马力拖拉机,通过U型卡扣实现快速连接,并集成播种箱、四杆仿形支架、液压导向套及覆土镇压系统,完成开沟、铺管、覆膜、覆土一体化作业。关键部件设计包括:基于《农业机械设计手册》的牵引功率匹配,确保设备在混凝土路面、松软土壤等工况下的动力需求;锥台型种箱通过自然休止角校核与容积优化,平衡了容量与机动性;锄铲式开沟器通过入土角(45°)、切土角(20°)参数优化,实现…
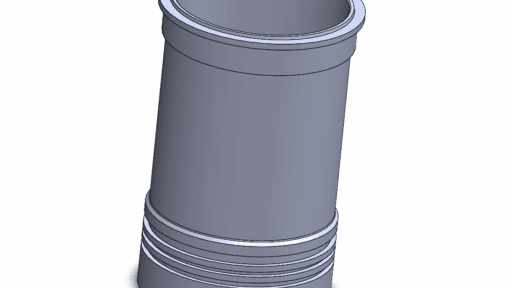
摘要 内燃机功率密度与热效率的持续提升,使得缸套热负荷与机械载荷显著加剧,传统冷却系统与材料体系面临严峻挑战。本文针对发动机缸套的冷却性能与结构可靠性,开展基于有限元仿真的优化设计研究。通过建立轴对称简化模型,结合流固耦合分析方法,系统评估缸套在热-机载荷作用下的变形、应力及应变分布规律。研究重点聚焦于结构拓扑优化与材料性能提升,采用局部增厚与减薄的协同设计策略重构应力传递路径,并通过铝合金向不锈钢的材料替代实现刚度强化。仿真过程中集成ANSYS Workbench平台的多物理场分析功能,优化网格划分策略与边界条件…
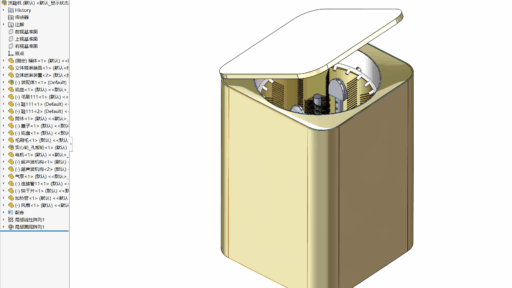
摘要 随着生活品质提升与消费需求升级,传统手工洗鞋方式已无法满足现代家庭对高效、便捷、智能化鞋类清洁的需求。现有洗鞋机产品普遍存在功能单一、智能化程度不足及用户体验欠佳等问题,尤其缺乏集清洗、烘干、消毒、除臭于一体的多功能解决方案。针对此市场空白,本研究设计了一款家用型多功能洗鞋机,通过系统化创新实现多技术融合与性能优化,旨在推动洗鞋设备向智能化、节能化方向演进。研究采用模块化设计方法,首先构建了以立式滚筒为核心的结构框架,集成高压喷淋、仿形毛刷、热泵烘干及紫外-臭氧协同杀菌模块,通过三维建模与运动仿真验证机械系统…

摘要 液态氢罐作为氢能储运的核心装备,其安全性与可靠性直接制约氢能技术的规模化应用。针对液态氢极低温(-253℃)与高压(70 MPa)耦合工况下的结构失效难题,本文基于ANSYS Workbench平台,构建了液态氢罐的精细化有限元模型,系统开展了静力学与模态仿真研究。通过优化筒体与支座的结构参数,验证了储罐在极端载荷下的力学性能:筒体最大应力66.29 MPa,最大变形0.009 mm;支座最大应力86.15 MPa,最大变形1.10 mm,均低于材料屈服强度,安全系数达1.68。模态分析表明,储罐前六阶固有频…
摘要 温度控制是无论是在工业生产过程中,还是在日常生活中都起着非常重要的作用,过低的温度或过高的温度都会使水资源失去应有的作用,从而造成水资源的巨大浪费。特别是在当前全球水资源极度缺乏的情况下,我们更应该掌握好对水温的控制,把身边的水资源好好地利用起来。本次设计为一个基于PLC的车载式饮水机的设计,该饮水机可以实时检测饮水机水箱的水温,并且可以自动控制加热,可以人为设置水的温度的上下限,如加热,当温度在设定的范围内时正常工作,当低于水温下限时控制加热器加热,温度检测范围0~95℃,精度±1℃,当温度超过设定值时具有…
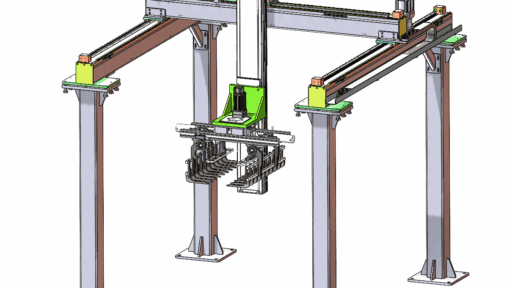
摘要 本文对直角坐标机器人的设计进行了深入而全面的研究。文章首先从总体方案设计出发,通过对比多种可能的方案,最终确定了末端执行器的具体结构,这包括手爪的类型、夹紧装置的结构、手部手指的设计以及袋料抓手的压架设计等关键部分。同时,文章还对袋料抓手的驱动方案、电气控制方案以及运行方案进行了详尽的比较与分析,并最终确定了最优方案。在设计计算部分,文章对驱动机械手的气压缸、压架的气压缸推力、连接杆的尺寸以及手指部分的弯曲强度等进行了严格的校核,确保了设计的合理性与可靠性。通过本次设计,成功开发出了一种结构紧凑、操作简便且夹…
文献综述 随着建筑和制造业的快速发展,门窗生产系统对钻孔装置的要求越来越高。目前行业需要更高效、更精准的钻孔技术来提高生产效率和产品质量[1][3][6]。国内外学者针对钻孔装置的设计和优化开展了大量研究。国外学者Sun等(2023)提出了新型加工方向控制技术,Domínguez-Monferrer(2022)研究了钻孔装置的自动化控制方法,这些成果为国内研究提供了重要参考[2][38]。国内学者王宁等(2023)开发了液体辅助激光钻孔技术,提高了盲孔加工精度;王忠宾等(2024)设计了煤矿防冲钻孔机器人,实现了全…
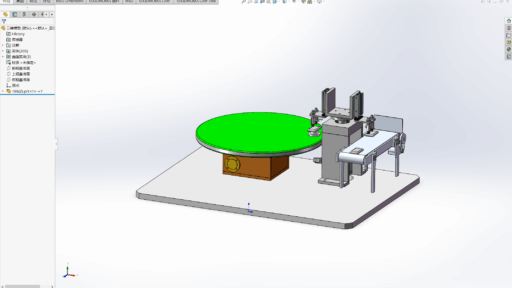
摘要 本文系统研究了全自动旋转装载搬运机的结构设计与性能优化,旨在解决传统搬运效率低、精度不足及自动化水平有限的问题。研究着眼于提高设备运行效率、定位精度和可靠性,对旋转动力装置、联轴器补偿机构、旋转中心轴、升降气缸装置及蜗轮蜗杆传动系统等核心部件进行了创新设计。通过对比伺服电机、步进电机与直流电机的动态响应特性,最终选用闭环控制伺服电机。联轴器采用聚氨酯材质梅花联轴器,解决了安装偏差与振动问题。旋转中心轴结合精密加工,实现高负载下的稳定性。升降气缸与真空吸盘协同设计,实现快速升降。实验结果表明,该设计提升了搬运效…
摘要 甘蔗为牲畜和人类的营养需求提供了大量能量。基于其土地利用因素,任何植物单位面积的卡路里价值它都是最高的。此外,甘蔗的成分(70%的水、14%的纤维、13.3%的蔗糖(约 10 - 15%的蔗糖)和 2.7%的可溶性杂质)可以说,世界上 60%的糖产量来自甘蔗,其余部分由甜菜提供。 辊式甘蔗榨汁机在甘蔗制糖及饮品加工领域至关重要。早期多为人工或简单机械压榨,效率低下。如今,国内外发展迅速,国内常见两轮、三轮及五轮压榨机型,集入料、压榨等功能于一体,环保高效 。国外则以四辊、六辊为主,如澳大利亚等地研发的压辊间…


