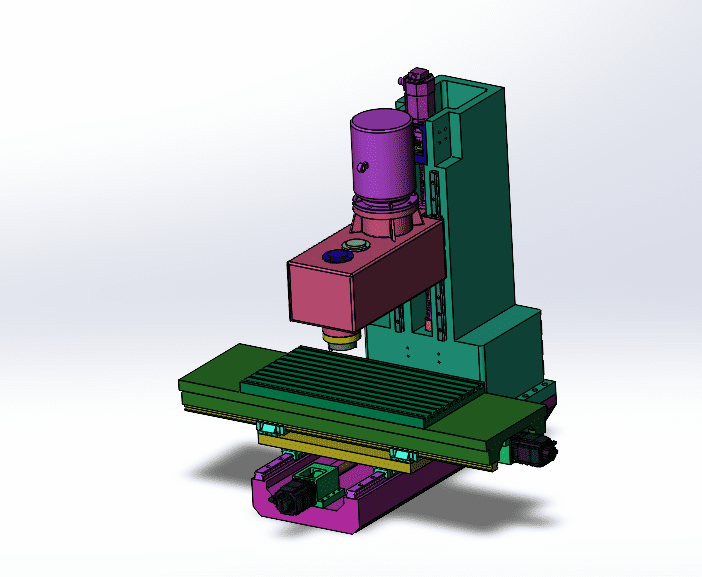
摘要 本文着重研究了一种立式数控铣床Z轴传动系统及立柱设计,以提升机床的整体性能,满足现代制造业对高精度、高效率加工的需求。本文首先介绍了立式数控铣床的基本工作原理和结构特点,分析了Z轴传动系统在机床运动控制中的关键作用。随后,对Z轴传动系统的核心组件进行了深入研究,包括伺服电机、传动机构、滚珠丝杠等,提出了合理的选型与设计思路。在立柱设计方面,本文综合考虑了立柱的承载能力、刚度和稳定性等因素。通过对立柱的材料选择、截面形状优化、连接方式设计等方面的研究,实现了立柱结构的轻量化与高性能化。同时,本文还对立柱与Z轴传…
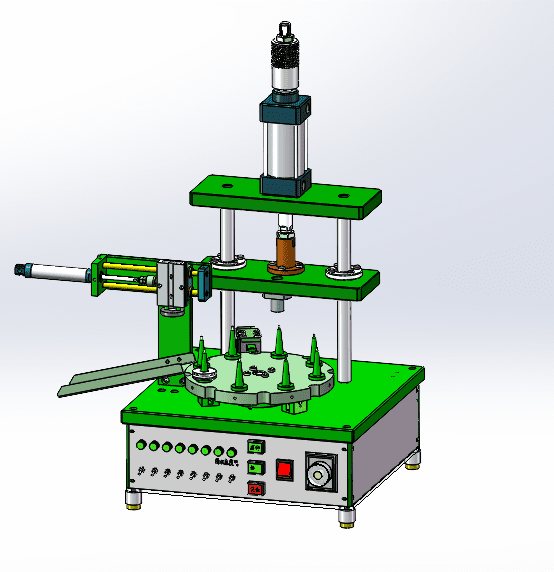
摘要 随着工业化的快速发展和机械制造业的不断进步,轴承作为机械设备中重要的传动元件,其质量和性能对设备的运行稳定性和寿命具有决定性的影响。轴承压装作为轴承安装的关键环节,其精确性和效率直接关系到轴承的工作性能和整个机械设备的运行效果。然而,传统的轴承压装技术往往存在着压装精度不高、操作复杂、效率低下等问题,无法满足现代机械制造业对高精度、高效率的需求。本文着重介绍了一种新型的轴承压装装置的设计,针对现有压装技术中的不足与缺陷,进行了深入的研究与创新。该设计以提高轴承压装的精确性和效率为目标,通过结构优化与功能增强,…
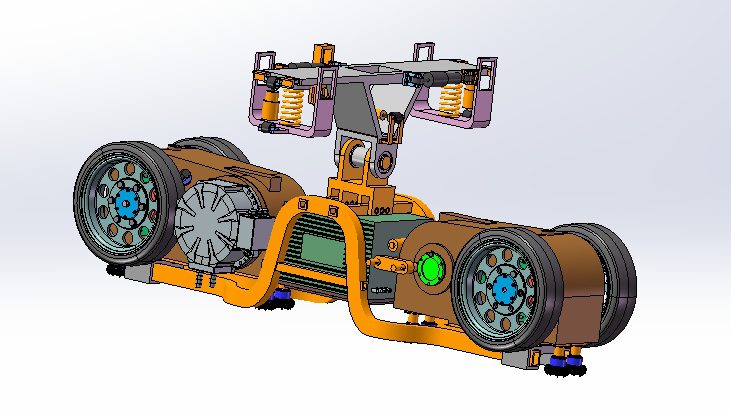
摘要 本论文主要研究了悬挂式单轨车辆转向架的设计及其关键零部件的有限元分析。悬挂式单轨交通系统作为一种新型的城市轨道交通方式,具有独特的优势,如建设成本低、适应性强等,因此其研究与发展具有重要意义。转向架作为单轨车辆的核心部件,其性能直接影响到车辆的运行稳定性和乘坐舒适性。论文首先介绍了悬挂式单轨交通系统的特点和发展现状,以及单轨车辆转向架构架的研究现状。在此基础上,提出了转向架的总体设计方案,包括设计准则和整体结构设计。随后,详细阐述了主要零部件的设计过程,包括构架设计、驱动单元设计以及牵引悬挂系统设计。在驱动单…
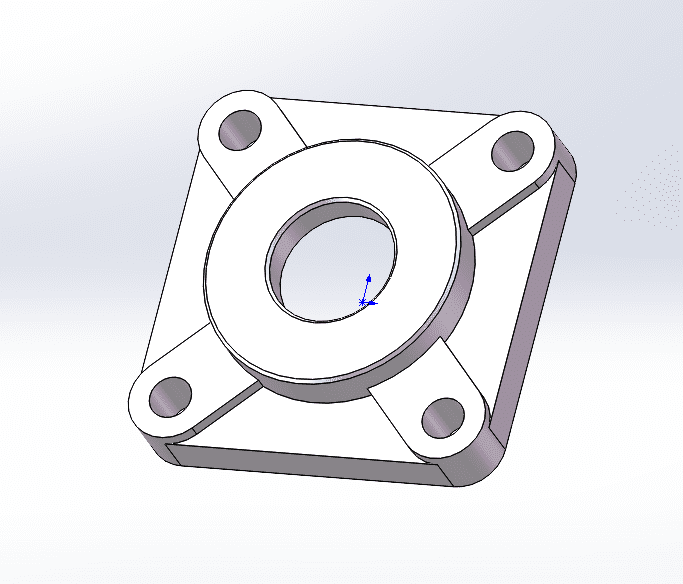
摘要 本论文主要探讨了轴承座的加工工艺及数控编程。首先介绍了轴承座在机械系统中的重要性和现有加工方法,然后详细阐述了轴承座的加工工艺流程,包括材料选择、毛坯制备、热处理、粗加工、半精加工和精加工等环节。接着,本文着重探讨了数控编程在轴承座加工中的应用,包括刀具选择、切削参数优化、走刀路径规划等关键技术。通过案例分析和实验验证,证明了数控编程在提高加工效率、降低成本、保证加工精度等方面的优势。此外,还对轴承座零件的三维造型及编程进行了研究,包括三维零件造型和数控程序的编制。最后,对全文进行了总结,并提出了未来研究的方…
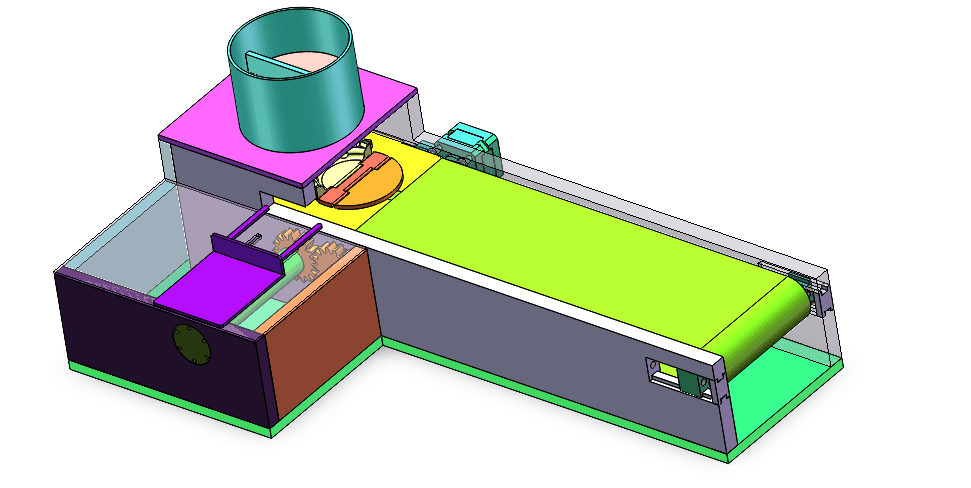
摘要 随着现代食品工业技术的不断进步和人们对生活品质追求的日益提升,自动包饺子机作为一种新兴的厨房设备,正逐渐走进人们的视野。本文旨在设计一种高效、智能、人性化的自动包饺子机,以满足现代家庭及食品生产企业的多样化需求。首先,本文详细介绍了自动包饺子机的设计原则和目标,即在保证饺子口感和品质的同时,实现生产过程的自动化和智能化。自动包饺子机能够在无人干预的情况下,自动完成饺子皮的输送、馅料填充、封口和成型等步骤,大大提高了包饺子的效率和便捷性。其次,本文还深入探讨了自动包饺子机的结构设计和仿真。在结构设计方面,本文注…
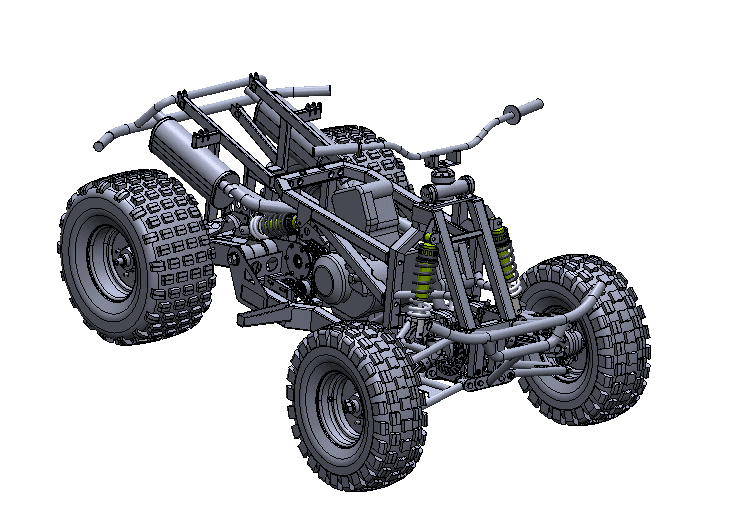
摘要 公牛越野车,这款以休闲驾驶为主旨的车型,特别为沙丘与沙滩地带设计。它承袭了美国本土沙漠运动车的经典造型,展现出独特的风格。其核心特性包括抗震式车架、长行程与高强度的减震系统,以及强大的前悬挂承载能力。其动力系统则以大扭矩、低油耗和高耐热为特点,而新颖的外观设计则为其增添了几分魅力。公牛越野车的演变历程,实则是基于其他车型的改装之路。原始的公牛越野车原型,便是在敞开车架上装配了经过改装的引擎。改装的主要方向,或是为了减轻车身重量,或是为了提升动力性能,核心目标都在于优化扭矩与车重之间的比率。这一变革对于车辆的整…
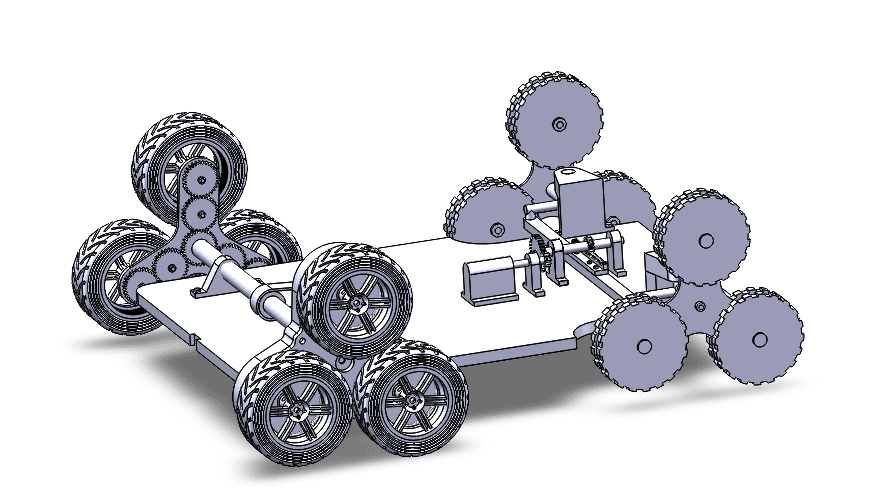
摘要 轮式自走型振动采摘机是一种新型的农业机械设备,它结合了轮式行走的灵活性和振动采摘的高效性,为现代农业生产提供了一种高效、便捷的采摘解决方案。轮式自走型振动采摘机适用于多种农作物的采摘作业,如苹果、梨、葡萄等水果,以及蔬菜等。它可以在农田中自由行走,根据不同的农作物和采摘需求进行调整和优化,实现全面的采摘作业。本文介绍了轮式自走型振动采摘机行走系统的设计。该系统结合了轮式行走和振动采摘两种功能,提高了采摘效率。设计包括行走机构的选型与优化,振动采摘机构的集成,以及控制系统的设计。通过理论分析和实验验证,该行走系…
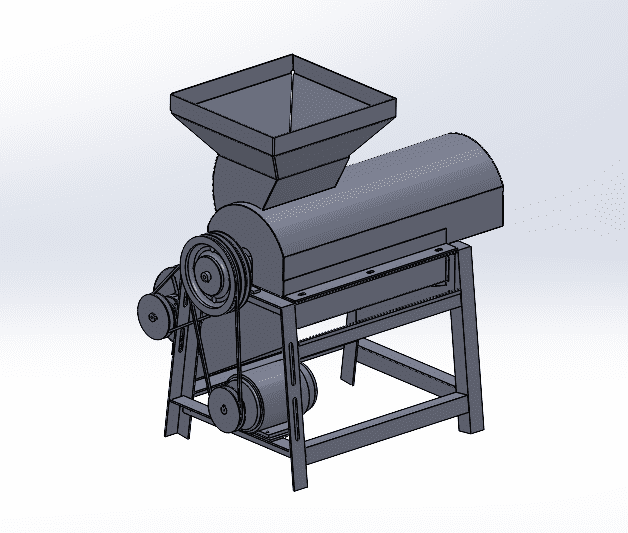
摘要 我国长期以来一直是农业大国,而玉米作为国内三大主要粮食作物之一,其年种植面积大约有3.67亿亩。然而,随着大量农村劳动力涌向城市,推动农业机械化的重要性也日益凸显。使用玉米脱粒机不仅可以提高劳动生产率和粮食单产,还能大大降低生产成本。因此,研究玉米脱粒机并推进玉米生产种植的机械化,对我国农业发展具有重要的意义。玉米脱粒机的主要结构包括动力装置、脱粒体、筛体和带传动装置等。其工作原理是模拟揉搓的动作,使玉米穗在脱粒体和筛体之间运动进行脱粒。在脱粒完成后,玉米粒会从筛体的缝隙中落下,而玉米杆则会通过排料口进行排出…
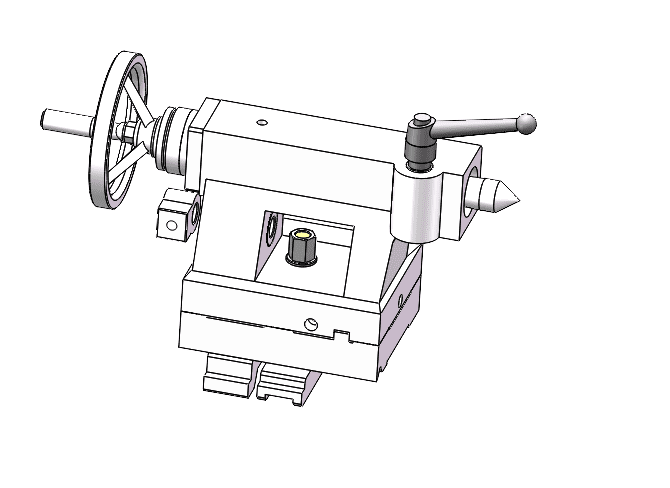
摘要 本文旨在设计并分析一种车床尾座结构,以提高车床的加工精度和效率。通过对车床尾架的工作原理和主要作用进行深入探讨,本文提出了一个总体方案设计,并对关键零部件如顶尖、套筒、丝杠、手轮、轴承和法兰盘进行了详细设计。在设计过程中,本文遵循了机械设计的基本原则,并优化了尾架套筒的设计,以提高其性能和使用寿命。为了验证设计的合理性和可靠性,本文对车床尾座的关键零部件进行了仿真分析。通过静力学分析和模态分析,对零部件的强度和振动特性进行了评估。结果表明,所设计的车床尾座结构具有良好的力学性能和稳定性,能够满足车床加工的要求…


