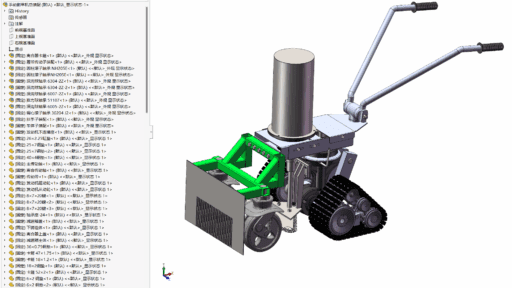
摘要 本文旨在设计一种适应山地环境的手动割草机,通过对比往复式、旋转式切割装置和轮胎式、履带式行走装置的优缺点,最终选择链条式切割装置和小型三角履带行走装置。研究方法包括理论分析、结构设计和有限元分析。研究结果确定了割草机的总体设计方案,完成了关键零部件的结构设计,并通过有限元分析验证了主承力件的结构可靠性。主要结论表明,所设计的手动割草机在复杂山地环境中表现出良好的适应性和稳定性,为割草机在山地环境的应用提供了有效方案。关键词:割草机;链条式切割;三角履带行走;有限元分析 目录 1 绪论 11.1 研究背景 11…
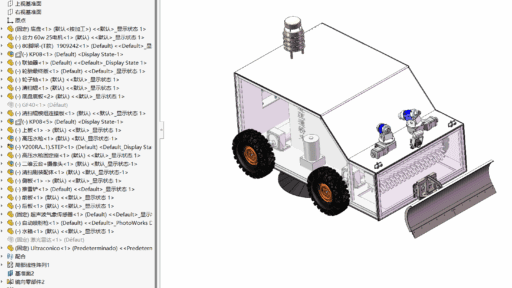
摘要 随着极端天气事件频发,城市排水系统面临严峻挑战,短时强降雨常导致排水口堵塞,引发内涝灾害。本文设计了一种短时强降雨天气下道路排水口清理机器人,旨在提高城市排水系统的应急处置能力。机器人集成推淤铲、清扫辊及清扫机构,采用四轮独立驱动系统,具备自主导航与避障功能,适应复杂路况。本文详细阐述了清理机器人的设计原理与实现过程。首先,通过分析国内外研究现状,明确了设计要求和关键技术。随后,提出了机器人的总体设计方案,包括推淤铲、清扫辊 及清扫机构的设计,并详细设计了四轮独立驱动系统。采用ANSYS Workbench对…
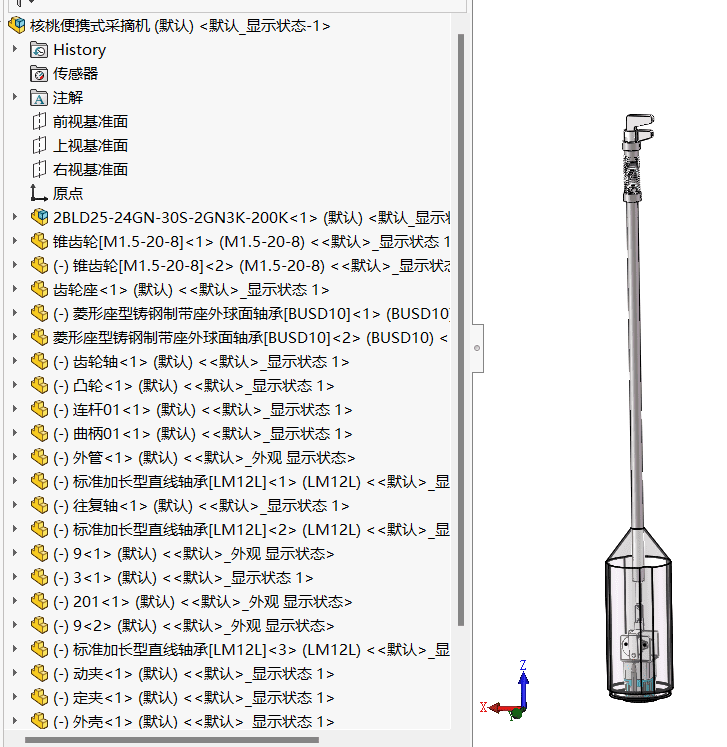
摘要 本文研究设计便携式核桃采摘装备,旨在提高核桃采摘效率,降低人工劳动强度。通过调研核桃采摘现状,结合国内外振动式采摘机研究,确定高频小振幅振动激励方案。采用拉格朗日法建立核桃振动脱落模型,分析核桃脱落条件,确定采摘机振动输出参数。设计便携式核桃采摘机,包含采摘头、连接杆和锂电动力系统,采用曲柄滑块机构实现振幅和频率可调。通过有限元分析验证传动轴强度和变形在安全范围内。结果表明,设计装备作业效率高、果实破损率低 、便携性好,满足核桃采摘需求。 关键词:核桃采摘;有限元分析;振动采摘机;便携式设计 目录 摘要: I…
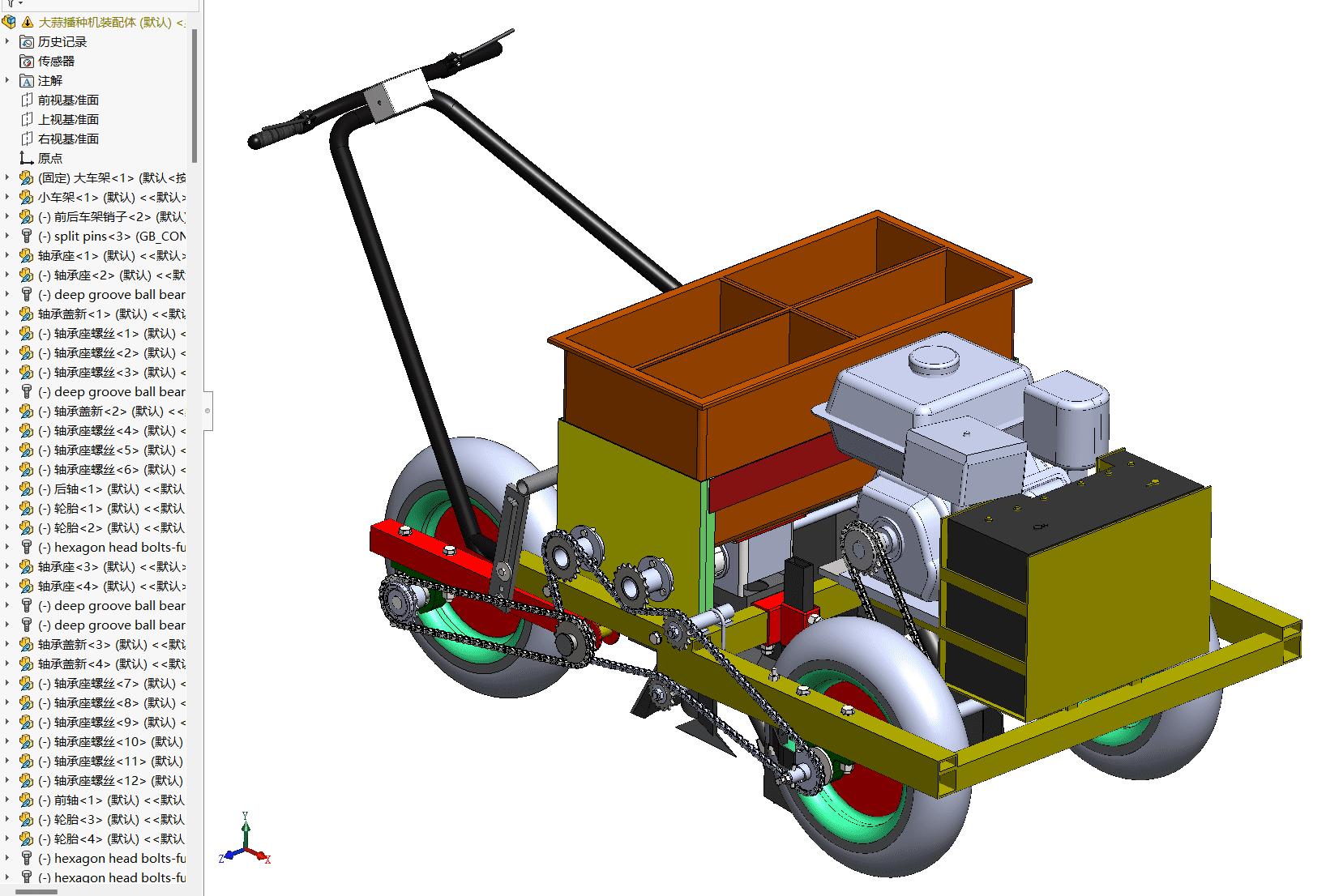
摘要 本文研究了大蒜播种机的设计与优化,旨在提高大蒜种植机械化水平。通过分析大蒜物理特性,明确了播种机的工作原理,并设计了双轴协同播种机制、动态种子管控系统、轴向稳定控制系统和自适应清种装置。通过模态仿真分析关键零部件,评估了机架的动态性能。研究结果表明,所设计的大蒜播种机能有效提高播种直立率,降低破碎率和重播率,满足不同大蒜品种的播种需求。主要结论为:该设计提升了大蒜播种的机械化水平,为农业生产提供了高效、可靠的设备。关键词:大蒜播种机;双轴协同播种;动态种子管控;模态仿真 目录 1 绪论 11.1 研究背景及意…
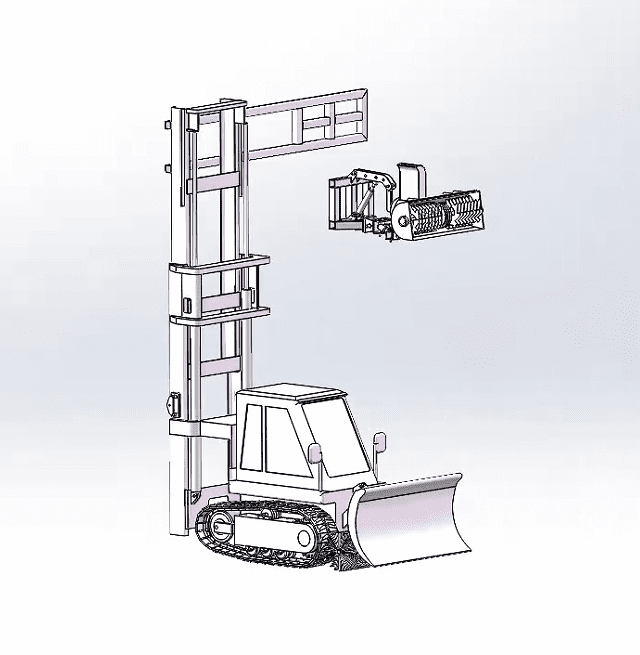
摘要 本文围绕温室大棚除雪机器人的设计展开研究。在绪论部分,首先介绍了课题的背景及意义,强调了温室大棚除雪对于保障农业生产的重要性,以及开发高效除雪机器人的必要性。接着,概述了除雪机器人在国内外的研究现状,为除雪机器人的设计提供了参考和借鉴。在总体方案设计阶段,明确了温室大棚除雪机器人的设计要求,包括适应性、高效性、稳定性等,并提出了具体的总体方案。关键零部件设计是本文的核心内容,详细阐述了动力源的计算方法、抛雪筒的结构设计方案、扫雪机绞龙的设计思路以及升降液压缸的计算校核过程。这些设计确保了除雪机器人能够适应温室…
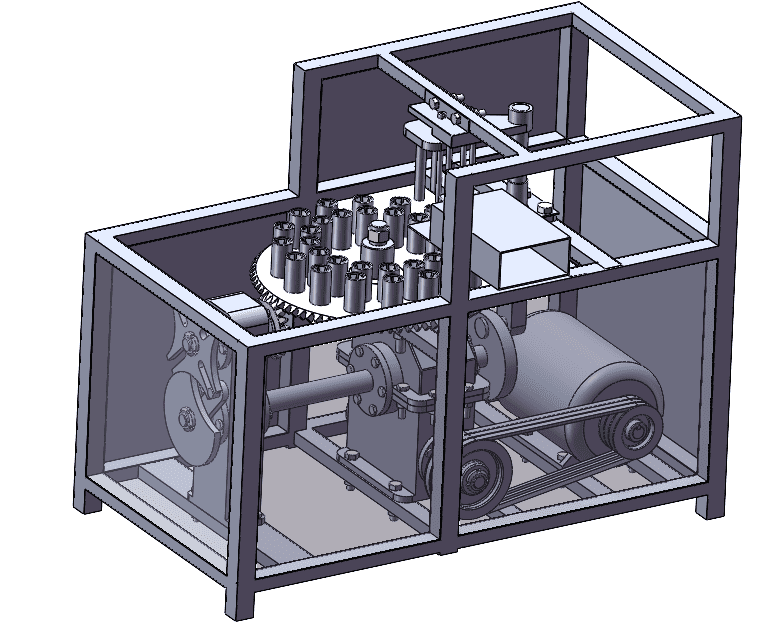
摘要 本文设计了一种联动红枣去核机,旨在提高红枣加工过程中的自动化水平和生产效率。通过对红枣去核机执行机构方案的深入研究,选择了对心曲柄滑块机构和槽轮机构作为核心执行机构,实现了冲针往复直线运动和旋转盘间歇转动的协调配合。同时,设计了合理的传动系统方案,确保了整个机械装置的运动精度和可靠性。基于ANSYS Workbench对红枣去核机的主要受载机构和机架进行了有限元仿真分析,验证了设计的合理性和可行性。结果表明,该联动红枣去核机结构紧凑、运动平稳、效率高,能够满足红枣加工企业的实际需求。本文的研究不仅提高了红枣去…
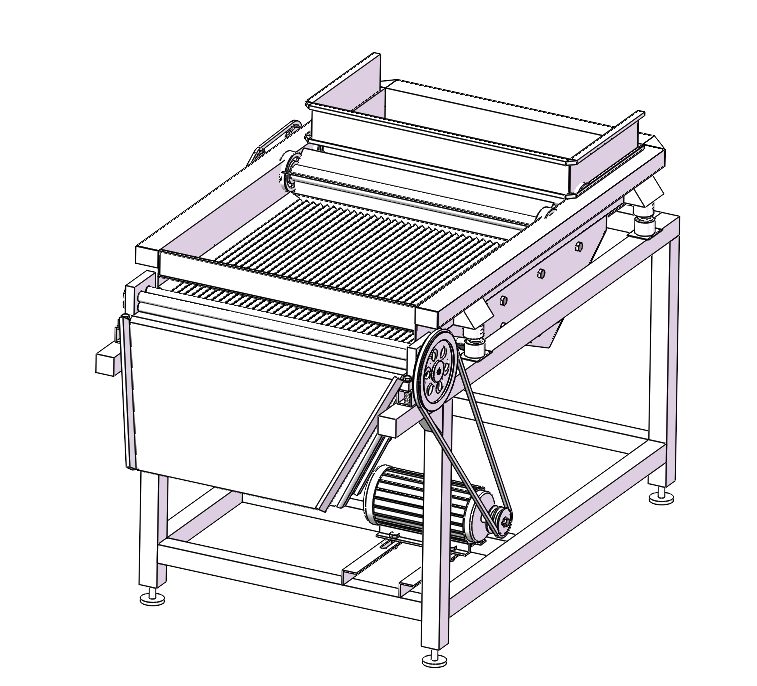
摘要 随着现代农业对高效加工设备需求的不断增加,对于毛豆去皮机的设计和优化显得尤为重要。本文围绕毛豆去皮机的结构设计展开了系统性的研究工作,其目的在于研发出一款具备高效、自动化特点,并且性能可靠的毛豆去皮设备。在喂料装置中,采用了三个呈120°分布的叶片,确保毛豆均匀喂料并避免堵塞。输送装置通过振动导向槽调整毛豆的位置,使其以正确的姿态进入去皮轧辊。去皮装置中的喂料轧辊和去皮轧辊通过齿轮传动实现同步转动,确保稳定夹持和高效去皮。为了适应不同尺寸的毛豆,设计了可调间距的支座,提高了设备的灵活性。在传动结构设计方面,采…
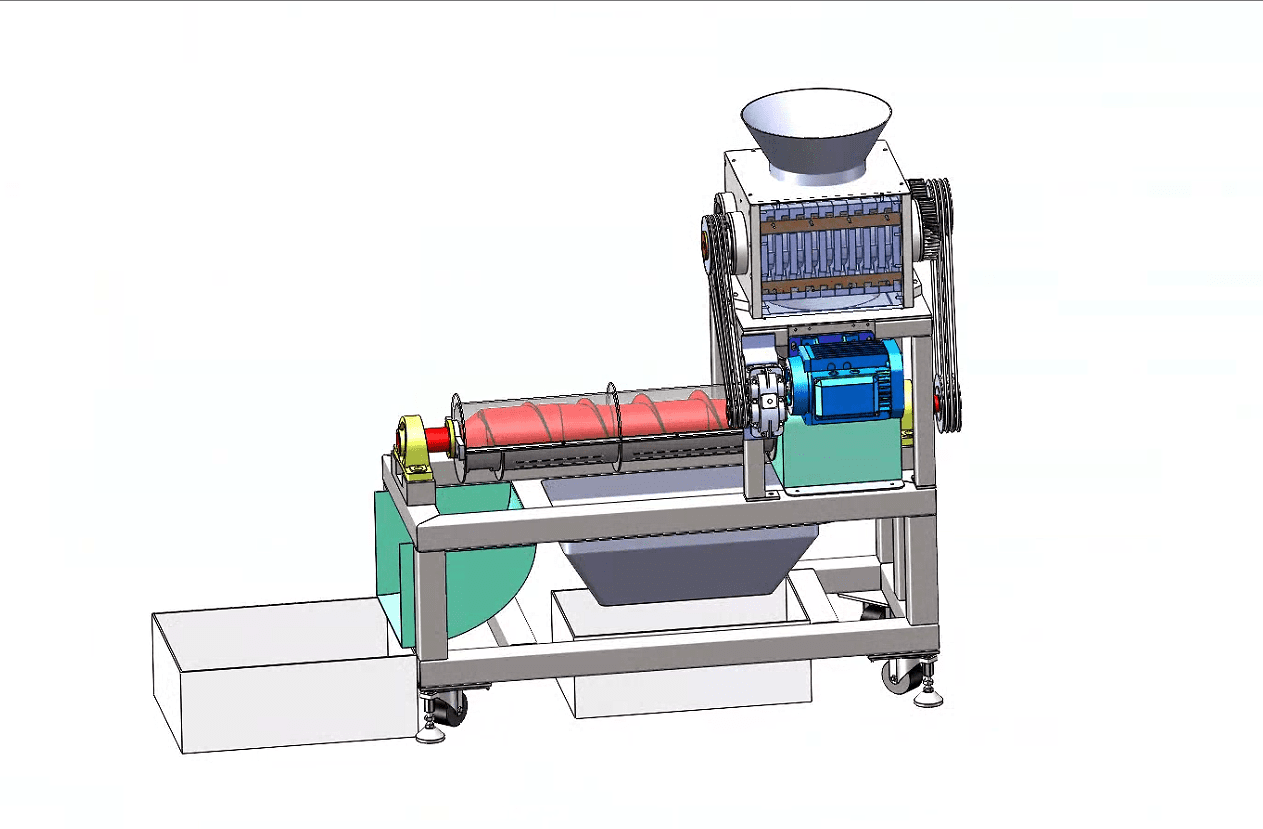
摘要 本研究针对厨余垃圾处理难题,设计了一种高效、环保的厨余垃圾粉碎机。通过双轴对向旋转粉碎和螺旋挤压输送技术,实现对厨余垃圾的有效粉碎和固液分离,显著减少垃圾体积和重量,提高处理效率。设备结构包括粉碎装置、挤出出料装置、传动系统及辅助装置,通过合理设计确保高效粉碎和低噪音运行。通过有限元分析验证了关键零件的强度,确保设备运行的可靠性和稳定性。本研究设计的厨余垃圾粉碎机不仅能有效解决厨余垃圾处理难题,还能促进资源循环利用,减少环境污染,具有广泛的应用前景。 关键词:厨余垃圾;粉碎机;挤出装置 目录 1 绪论 11.…
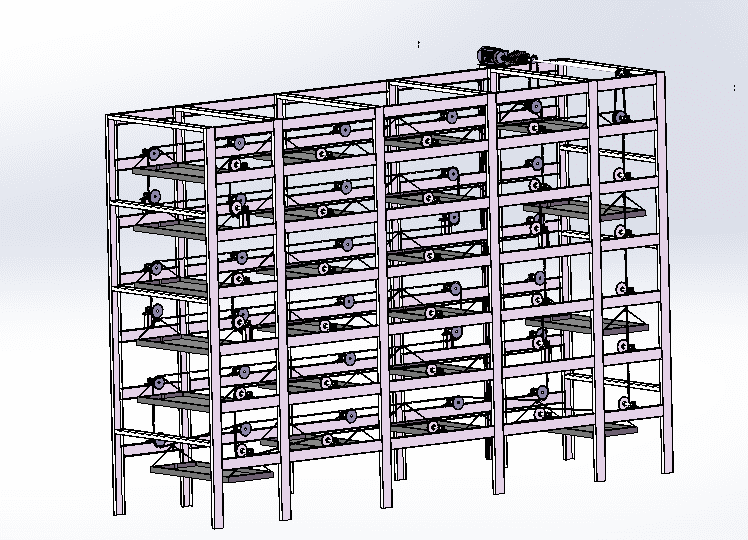
摘要 随着现代养蚕业对自动化技术需求的不断增长,本文提出并详细阐述了一种创新的多层蚕台循环机结构设计方案。这项研究旨在通过提高作业效率和降低人工成本来解决传统养蚕过程中存在的效率低下问题。文章首先介绍了研究的背景及其在现代农业机械自动化领域中的重要意义,继而深入分析了多层蚕台循环机的国内外研究现状,为后续的研究提供了坚实的理论基础。然后明确了多层蚕台循环机总体设计的目标任务,并描述了其工作流程、机构组成以及总体装配方案。这些工作为设备的设计过程奠定了坚实的基础,并确保了设计方案的可行性与实用性。着重于多层蚕台循环机…
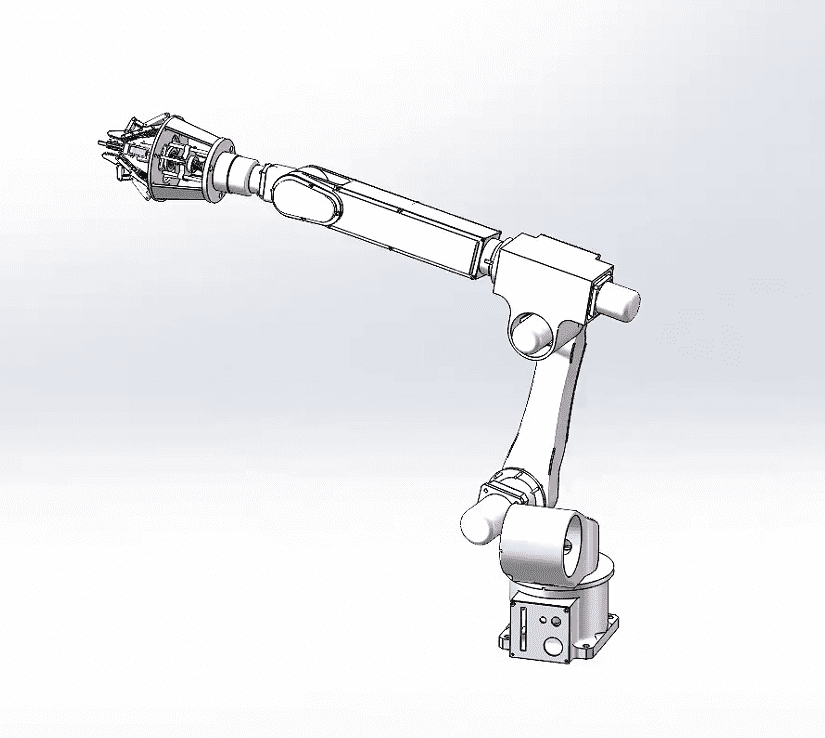
摘要 本研究设计了一款基于PLC的茄子采摘机械手,旨在提高茄子采摘的自动化水平。通过对茄子采摘机械手的总体方案设计、结构设计、运动学分析及应力分析、有限元仿真及优化以及PLC程序设计等方面的深入研究,本研究成功设计了一款高效、稳定的茄子采摘机械手。该机械手采用了先进的PLC控制技术,能够实现精确控制,提高了采摘效率,减少了人力成本。此外,本研究还通过有限元仿真及优化,对机械手的结构进行了优化,提高了机械手的承载能力和使用寿命。本研究设计的茄子采摘机械手具有较高的自动化水平和采摘效率,为农业生产自动化领域的发展做出了…


