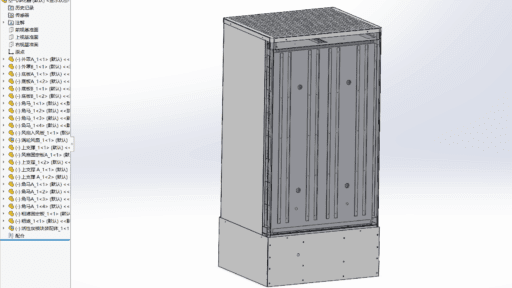
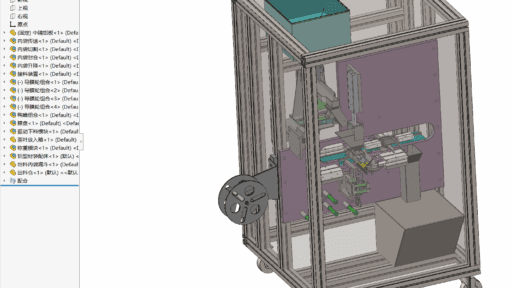
摘要 随着现代电子制造业的快速发展,电子车间内空气质量的问题日益凸显。由于电子车间中常存在大量的焊接、组装等工艺,这些过程中产生的烟尘、有害气体和微小颗粒物不仅严重影响工作人员的身体健康,还可能对精密电子设备造成损害。因此,开发一种能够有效净化电子车间空气的多功能空气净化机显得尤为重要。基于可编程逻辑控制器(PLC)的控制系统因其稳定可靠、易于编程和维护的特点,在工业自动化领域得到了广泛应用。本研究旨在结合PLC控制技术,设计一款适用于电子车间的多功能空气净化机,以改善车间环境,保障员工健康和生产安全。本文详细探讨…
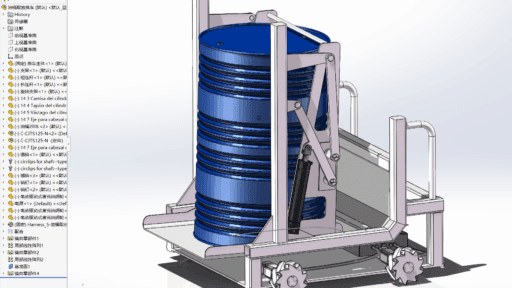
摘要 随着工业化和物流行业的快速发展,桶装油品的运输和倾倒成为了一个重要的环节。传统的桶装油倾倒方式往往存在操作不便、效率低下以及安全隐患等问题,特别是在狭小空间或特殊环境下,这些问题尤为突出。因此,设计一种高效、安全且操作简便的全向桶装油倾倒车结构显得尤为重要。本文研究并设计了一种装有全向轮的桶装油倾倒车结构,可满足不同环境下桶装油品的快速、安全倾倒需求。该设计充分考虑了倾倒过程中的稳定性、灵活性和安全性,通过机械结构设计、控制系统优化以及倾倒角度的精确控制,实现了桶装油的全向倾倒。文章首先分析了现有桶装油倾倒技…
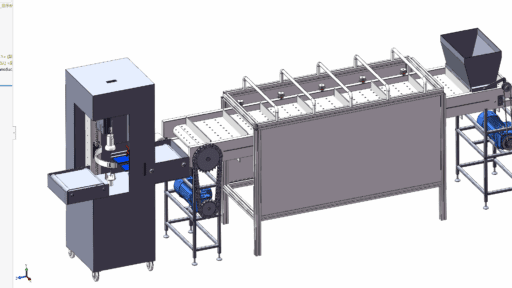
摘要 本文旨在设计一种自动化柚子剥皮装置,以提高柚子加工效率和降低劳动强度。研究通过文献综述明确了当前柑橘类水果剥皮设备的不足,提出了两种去皮方案,并选择了成本低廉、性价比高的方案进行详细设计。该装置包括上料清洗传动机构和剥皮部分结构,采用电机驱动传送带和气缸 夹紧柚子,通过刀具上下平稳运动实现切削。对关键零部件进行了有限元分析,验证了结构的强度和刚度。结果表明,该装置实现了自动化剥皮,提高了剥皮效率和剥皮质量,为柚子加工产业提供了技术支持,推动了农业机械化的发展。关键词:柚子剥皮装置;自动化;剥皮效率;有限元分析…
摘要 随着食品工业的快速发展,消费者对食品包装的品质和效率提出了更高要求。芝麻糊作为一种深受大众喜爱的传统食品,其包装过程的高效性和稳定性成为关键问题。传统的手工包装方式已难以满足现代生产需求,不仅效率低下,且难以保证包装质量的一致性和卫生安全。因此,开发一款能够自动完成芝麻糊计量、充填、封口等一系列包装工序的机器显得尤为重要。本研究旨在通过综合运用机械设计、自动化控制及材料科学等多学科知识,设计一款高效、智能的芝麻糊包装机,以提升生产效率,降低人工成本,并确保包装过程的卫生与安全。本文详细阐述了芝麻糊包装机的设计…
摘要 本研究旨在设计一种适应性强、操作简便的单行玉米收割去皮机,以提高玉米收割效率,减轻农民劳动强度。通过文献调研和实地走访,明确了设计需求。采用机械设计软件进行三维建模与虚拟装配,对切割装置、输送装置、剥皮装置及动力传动系统进行了详细设计。研究结果表明,设计的单行玉米收割去皮机采用多棱形分禾器、双链同步式拨禾链、卧式摘穗机构和甩离式去皮 装置,实现了高效、稳定的玉米收割与去皮。有限元分析验证了剥皮棍设计的合理性,确保了设备的强度和刚度。主要结论为:该机型适用于中小地块,能有效提高玉米收割效率和质量,减轻农民负担,…
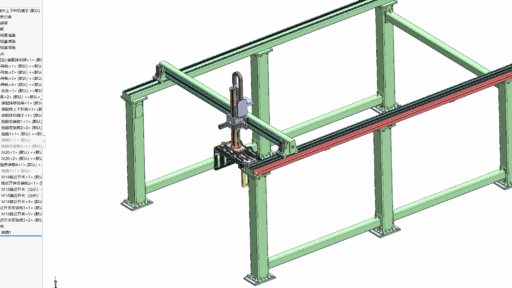
摘要 在“中国制造2025”战略及工业化快速发展的背景下,制造业正经历着向智能化转型的关键时期。随着劳动力成本上升和职业病问题的日益凸显,开发高度自动化的上下料机械手成为提升生产效率、降低人力成本、保障工人健康的重要途径。上下料机械手作为工业自动化的关键设备,其智能化和自动化水平直接关系到制造业的竞争力。因此,本文旨在设计一种高效、稳定的上下料机械手,以满足现代制造业对自动化、智能化生产的需求。 关键词:上下料机械手;自动化控制;PLC;工业自动化 目录 第1章 引 言 11.1选题的背景及意义 11.2国内外研究…
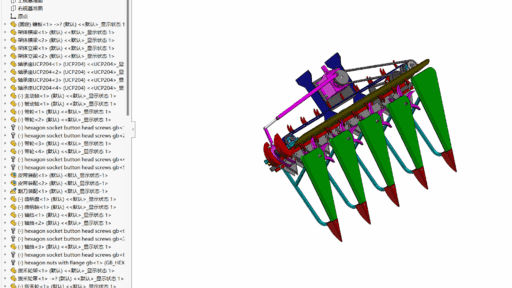
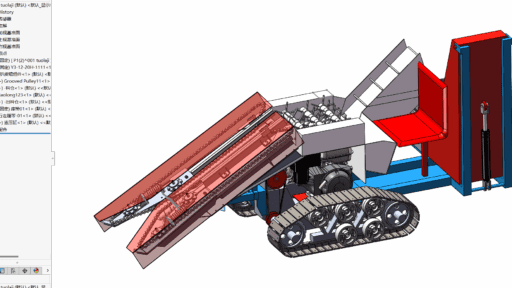
摘要 芦苇作为一种优质的生物质资源,具有极高的利用价值。然而,传统的芦苇收割方式,如人工收割和现有的水草收割船,存在效率低下、收割的芦苇凌乱、不利于加工利用等问题。这些问题不仅浪费了芦苇的资源价值,还可能对水资源造成污染。因此,研究和开发高效的芦苇收割机,特别是对其关键部件进行优化设计,对于提高芦苇收割效率、降低收割成本、提升芦苇的经济利用价值具有重要意义。针对上述问题,机械化采收芦苇带来的损伤率和含杂率问题,本芦苇收割机可以很好地解决。此芦苇收割机主要由传动装置、切割装置、汇集装置、整机机架装置等部件组成。整机由…
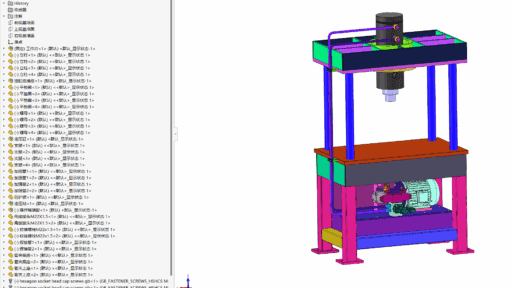
摘要 本文围绕小型液压机展开了全面系统的研究与设计。首先,在引言部分阐述了课题背景与研究意义,并对国内外研究现状进行了分析,明确了主要研究内容。在小型液压机设计方面,进行了工况分析,包括动力、运动分析,绘制负载与速度循环图,并确定了如液压缸工作压力、尺寸和最大流量等主要技术参数。随后拟定了液压原理图,涉及执行元件、方向控制、速度控制、压力控制和液压油源回路的选择与设计,并完成液压系统的合成。在元器件选择上,详细阐述了电机规格、液压泵的选型过程,包括计算最大工作压力、流量以及电机选择,同时介绍了液压元件、油管和油箱的…
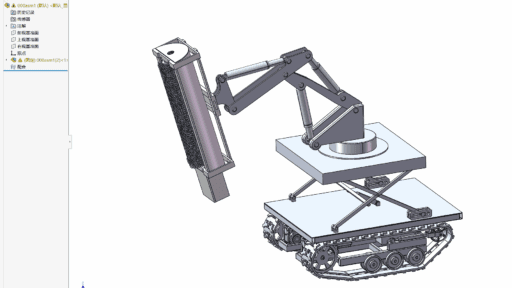
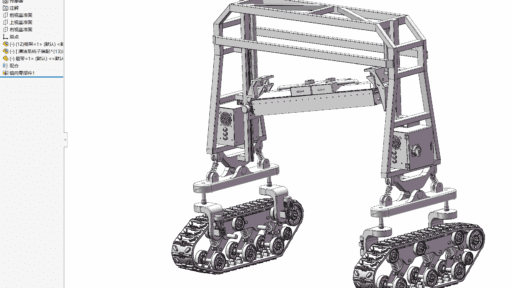
摘要 针对光伏板积灰导致的发电效率下降问题,本研究设计了一种基于PLC控制的履带式自动清洁车,适用于新疆戈壁地区分布式光伏电站。通过对比清洁机构方案(选定滚刷式)、行走机构(履带式)及升降机构(液压剪叉式),完成核心部件参数设计与选型:滚刷机构采用100W伺服电机驱动,清洁效率达97.5%;行走机构配备1500W永磁电机,最大爬坡角度25°,接地比压16.33kPa;升降台液压缸推力为12.6kN。利用ANSYS对机械臂进行静力学仿真,结果显示最大变形量0.39mm、应力35.24MPa,均低于材料屈服极限。结果表…


