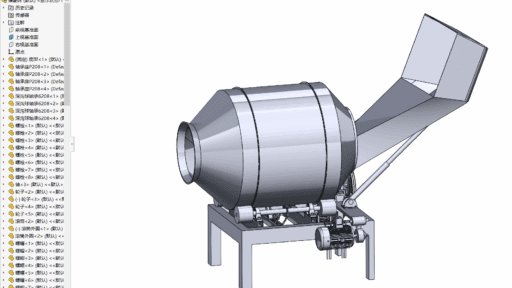
摘要 随着我国经济和技术的飞速发展,基础建设规模持续扩大,自动化生产逐渐普及,建筑机械在经济建设中的角色日益凸显。其中,混凝土搅拌机作为建筑机械的重要组成部分,对混凝土生产起到了关键作用。在现代建筑工程中,搅拌机不仅大幅减轻了工人的劳动强度,还确保了混凝土工程的质量。鉴于混凝土搅拌机需要处理大量砂石、水泥等混合材料,并在恶劣环境下工作,其向高技术、高效能、自动化、智能化方向发展显得尤为重要。搅拌的本质是使不同物质通过直接接触和扩散达到均匀混合。在混凝土搅拌机中,搅拌桶的旋转驱动搅拌叶片对桶内的物料进行翻转、挤压等操…

摘要 现阶段,西门子S7-200PLC广泛用于工业控制领域,其具有体积小、重量轻、逻辑运算功能强大等特点。本文所介绍的PID温度控制系统,针对炉温的控制需求,利用PLC内部的PID运算功能,通过温度传感器将炉温信号转换成模拟量传送至PLC中,与设定好的目标温度值进行比较运算,然后输出信号控制继电器的动作,加热器与继电器连接,跟随继电器实现通断从而进行温度调节,使温度始终控制在设定温度范围内。论文从总体方案、硬件软件、电路、控制流程等方面对该炉温控制系统进行详细设计,最终得到的系统温度控制准确,同时具有短路、过载保护…
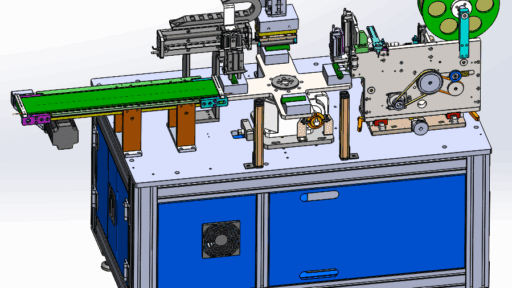
摘要 本文针对弧面产品贴标效率低、精度差的问题,设计了一种基于气动与机械协同控制的弧面贴标、贴纸装置。通过分析标签剥离力学特性和贴标工艺需求,提出了包含供标机构、转盘定位系统、压标模组及自动出料流水线的整体方案。采用步进电机驱动标签输送,结合气动控制实现精准贴标与压标,通过丝杠螺母机构和硅胶夹持手爪完成物料抓取与转移。实验结果表明,该装置贴标精度达 ±0.3mm,贴标速度为 150-200 件 / 分钟,可适应曲面半径 30-100mm 的多样化产品需求,显著提升了弧面贴标的自动化水平与生产效率。 关键词:弧面贴标…
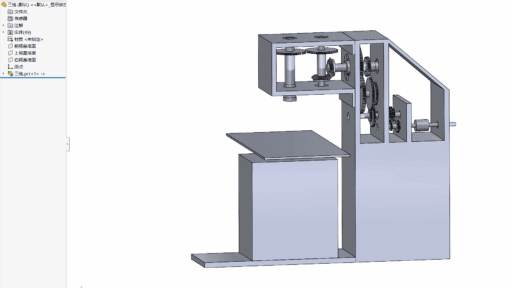
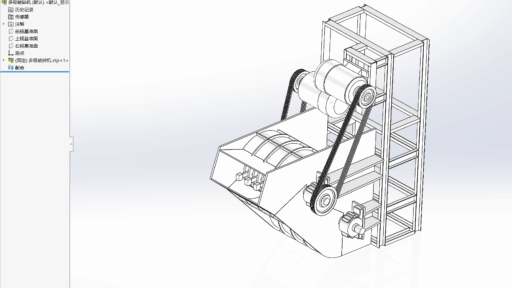
摘要 本研究对立式数控铣床的基本概况进行了阐述,并对机床主传动系统的原理及其类型进行了简要说明,同时对各种传动方案的机制进行了深入分析。立式铣床主传动系统由主轴电动机、主轴传动系统以及主轴组件三个核心部分构成。本研究详细探讨了立式铣床主传动系统的设计流程,指出该立式铣床主轴变速箱主要通过齿轮传动实现,主轴箱传动系统亦采用齿轮传动,传动方式为集中式,而主轴变速系统则采用多联滑移齿轮变速。齿轮传动因其高传动效率、紧凑结构、可靠性强、寿命长以及传动比精确等优势而被广泛采用。本研究还对立式铣床主传动系统中不同传动方案的优劣…
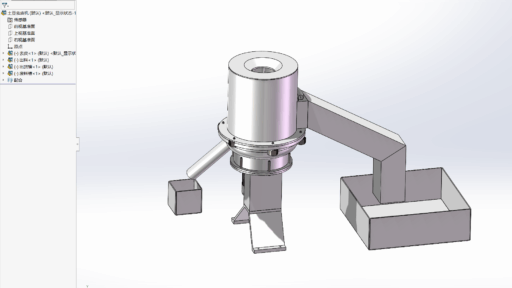
摘要 土豆去皮机作为食品加工机械中的重要设备,在提高土豆加工效率、降低人工成本以及减少资源浪费方面具有重要作用。本研究围绕土豆去皮机的结构设计与性能优化展开,从去皮机构、传动系统以及关键部件的参数设计入手,系统分析了设备的工作原理、设计要点和优化方法。在国内外研究现状的基础上,通过对比国内外土豆去皮机的技术特点与应用效果,总结针对传统土豆去皮机存在的去皮效率低、土豆损耗率高普遍达8%-12%、设备适应性差等痛点,本研究创新设计了一种滚筒圆盘摩擦式土豆去皮机。通过构建滚筒-圆盘双摩擦副结构,滚筒直径390mm/圆盘直…
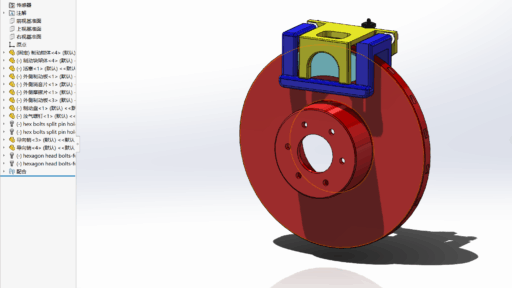
摘要 本文旨在设计并分析一种盘式制动器,以满足现代汽车对制动系统的高性能要求。首先,介绍了选题的背景及意义,指出了盘式制动器因其优越的散热性能、稳定的摩擦特性和紧凑的结构设计,在汽车制动系统中占据重要地位。接着,综述了国内外关于盘式制动器的研究现状,明确了本文的研究方向和内容。在制动器的结构与设计原则部分,详细阐述了汽车制动系统的功用及分类,介绍了盘式制动器的分类、结构与工作原理,并提出了制动器设计的一般原则,包括制动效能、制动效能稳定性、制动间隙调整简便性、制动器的尺寸及质量以及噪音的减轻等。在制动器设计章节,根…
摘要 本文设计了一种煤粉压球机,旨在通过高压压制技术将煤粉等粉末状物料成型为球形固体燃料,提高煤炭的清洁利用效率和成型质量。研究内容涵盖了煤粉压球机的总体结构设计、关键部件设计与分析、传动系统设计与校核等方面。通过方案筛选与比较,确定了最优设计方案,并详细设计了压辊、型辊材料等关键部件。传动系统经过精确计算与校核,确保了设备的稳定运行。本研究成果对于推动清洁能源技术的发展和煤炭资源的清洁利用具有重要意义。 关键词 煤粉压球机;粉煤成型技术;关键部件设计;传动系统设计 目录 摘 要 - 1 -ABSTRACT - 2…
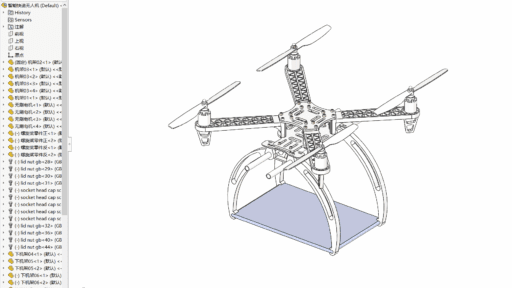
摘要 本文围绕智能快递投送无人机的设计展开研究,旨在探索一种能够高效执行运送任务。文章首先分析了海上救援工作的现状与挑战,强调了研发无人机进行海上救援的重要性和迫切性。随后,对国内外在海上救援无人机领域的研究现状进行了综述,指出了国内在该领域的发展潜力和研究方向。在无人机的总体方案设计中,本文详细阐述了无人机的构型选择、性能要求以及救援方案的制定。通过对比分析不同构型的优缺点,确定了采用固定翼构型作为海上救援无人机的主体结构。同时,结合救援任务的实际需求,对无人机的载荷能力、航程、稳定性等关键性能进行了优化。在无人…
摘要 运输油气运输中最主要的最快捷、经济、可靠的方法可以用于运输的水,石油,天然气,石油等,输量,距离长,安全性高,低成本的优势,在各国快速发展。运输业的主体,工程的核心工作是管口焊接。所以研究高效、性能可靠全自动焊接机的位置具有十分重要的意义。野外工作解决建设的自动焊接的难题,开发了一种轨道式焊接机,它的主要技术开发,包括:新型走的机构,焊头挥杆机关,和机卡车,焊头机械手。介绍的轨道式焊接机的构造设计和焊接机控制,重点其结构的特征,动作原理,设计要点的设计分析和说明。在现场,使用该功能向导平稳,可靠性高一直走,位…
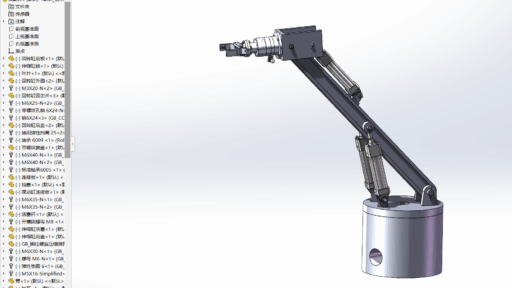
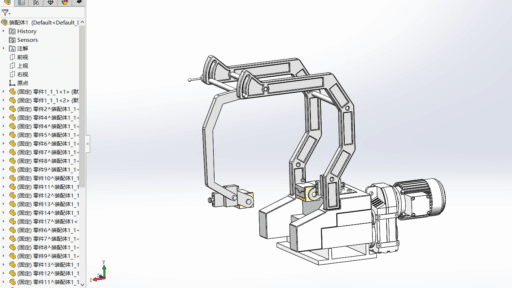
摘要 R175柴油机机体自动加工线多功能液压机械手采用活塞液压缸机构,通过活塞杆的直线运动带动杠杆机构和手爪,将工件夹紧,完成抓取动作。当液压缸断油时,活塞杆通过弹簧复位,从而松开工件。腕部采用叶片式回转缸机构,叶片带动机械手回转轴转动,完成机械手转动动作。手臂采用液压缸和连杆的组合机构,活塞杆与手臂铰接,通过活塞杆的直线运动来实现俯仰动作。本设计机械手为R175型柴油机机体加工自动线上的辅助装置,能完成上料、转位和翻转功能,能够在球面空间内完成送料。 关键词:液压传动;机构;动作 目录 前言………………………………


