
摘要 本次设计主题为“六旋翼农用无人机模型设计”,结合我国当前农业机械化发展现状,通过对命题的分析得到了更加清晰开阔的设计思路,设计作品具有系统性、实用性和创新性。针对多旋翼农用无人机,本文确定了“六旋翼农用喷药、航拍功能无人机”的设计说明书,介绍了无人机的设计过程,主要通过概念性论述,经过对无人机结构研究、分析的整体把握,以结构、动力、控制三部分进行设计,并结合实际通过对多旋翼农用无人机设想进行结构改进、设计优化以提高设计的应用性,这种方法对类似产品的设计制造同样具有借鉴作用。设计方案包括无人机整体机架、喷药机构…
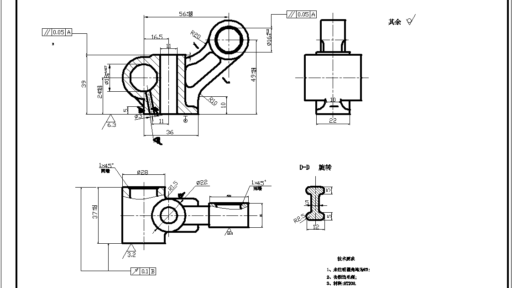
本文为机械制造技术基础课程设计说明书,核心内容是 CA6140 机床后托架的加工工艺设计及Ф6 和 M6 孔夹具设计。该后托架是机床关键支承零件,用于支撑光杠、丝杠和操作杠,关键表面(底面、侧面三孔)精度及粗糙度要求高(Ra1.6),需满足平面度等公差要求,生产批量为中批量 5000 件。 工艺设计方面,毛坯采用熔模铸造 HT200,粗基准选侧面三孔,精基准采用 “一面两孔” 定位;确定 “粗精分开、先面后孔” 的工艺路线(方案 Ⅱ),涵盖铸造、清砂、热处理、铣削、镗孔、钻扩铰、攻丝等工序,计算了各工序加工余量、切…
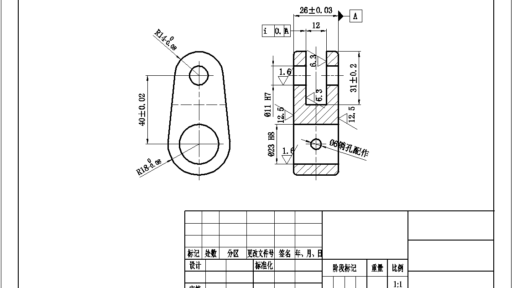
本文为机械制造技术基础课程设计说明书,核心内容是 CA6140 机床后托架的加工工艺设计及Ф6 和 M6 孔夹具设计。该后托架是机床关键支承零件,用于支撑光杠、丝杠和操作杠,关键表面(底面、侧面三孔)精度及粗糙度要求高(Ra1.6),需满足平面度等公差要求,生产批量为中批量 5000 件。 工艺设计方面,毛坯采用熔模铸造 HT200,粗基准选侧面三孔,精基准采用 “一面两孔” 定位;确定 “粗精分开、先面后孔” 的工艺路线(方案 Ⅱ),涵盖铸造、清砂、热处理、铣削、镗孔、钻扩铰、攻丝等工序,计算了各工序加工余量、切…
摘要 本文主要对三维果蔬切丁机条刀机构进行设计,研究条刀切丁机构中刀盘转速、直径大小,以及条刀与切丁颗粒大小、切丁断面平整度之间的关系,寻找现有切丁机难以切出高质量大丁的主要原因,通过理论分析切丁机构参数,优化机构中传动比,使切出来的丁的断面比较平整,符合市场客户的需求。关键词:条刀 切丁 断面分析 目录 第一章 切丁机的介绍 21.1 切丁机发展背景 21.2切丁机的原理 21.3三维果蔬切丁机可加工的食品以及能切出丁的尺寸 51.4 我国切丁机的发展现状及各国切丁机的对比 51.5 切丁机研究的目的和意义 6第…
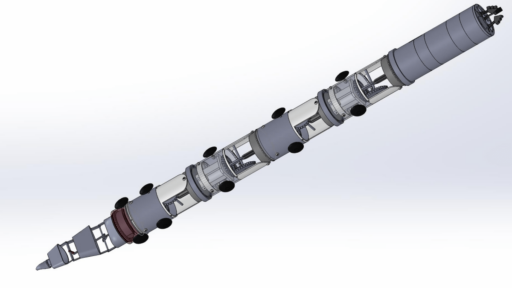
摘要 本设计是一种可携带的齿轮式蛇形搜救机器人,它集成了机械工程、电子技术、智能控制、计算机科学等多科领域先进研究成果,在救援中可用于环境勘探、破障、目标指示跟踪,可以为救援人员提供有效的信息以便做出最有效的措施。本论文的研究目的是设计机构新颖、具有独创性、可携带抗冲击的智能移动机器人。关键词:蛇形搜救机器人;三维仿真;轮子移动 目录 摘要ABSTRACT引言一、绪论1.1 背景及意义1.1 国内外发展趋势及研究状况二、设计方案2.1 机构设计2.2 驱动设计2.2 基本尺寸三、蛇形机器人的运动分析3.1 蛇形机器…
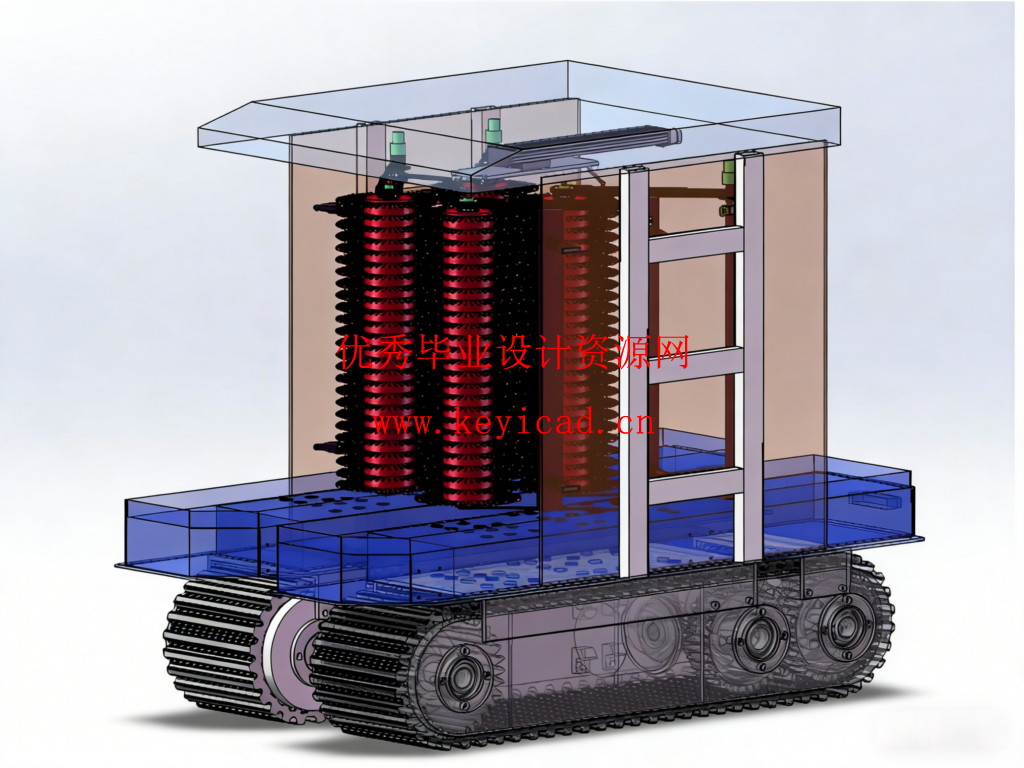
这款蓝莓采摘机器人是一款专为蓝莓果园设计的自动化农业设备,通过履带式移动平台与多组柔性采摘单元的协同作业,实现了蓝莓的高效、无损采收。 关键技术 柔性采摘单元:设备核心为多组垂直排列的红色柔性刷辊式采摘单元,其表面采用密集的软质刷毛结构。通过电机驱动刷辊高速旋转,以轻柔的搓动方式将蓝莓从果柄上分离,有效避免了对果实和植株的机械损伤,同时保证了较高的采摘效率。 履带式移动平台:设备底部采用橡胶履带式行走机构,通过驱动轮与履带的啮合传动,提供了强大的地面适应性和牵引力。这使得机器人能够在蓝莓果园的垄间、坡地等复杂地形中…
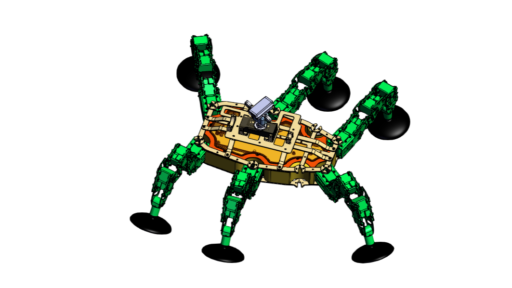
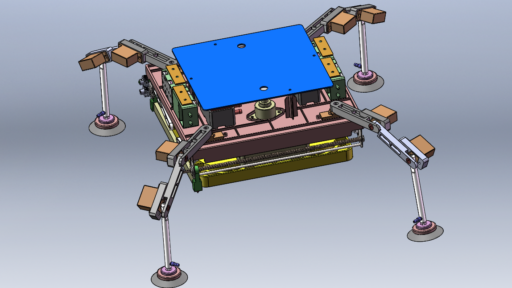
摘要 本研究聚焦于蜘蛛爬墙机器人的设计与实现,通过深入分析蜘蛛的爬行机制与附着原理,利用仿生学原理设计出了一款能够模拟蜘蛛爬行方式的机器人。本研究围绕蜘蛛爬墙机器人展开,旨在探索和设计一种能够模拟蜘蛛在垂直表面上高效、稳定爬行的机器人。通过对蜘蛛爬墙机理的深入分析,结合现代机器人技术和材料科学,本研究成功设计并制作了一种新型蜘蛛爬墙机器人。机器人采用了独特的附着技术,通过模拟蜘蛛的足部结构,结合粘附材料和微型吸盘,实现了在多种垂直表面上的稳定附着和爬行。同时,机器人还配备了高精度的感知系统,能够实时感知周围环境的变…
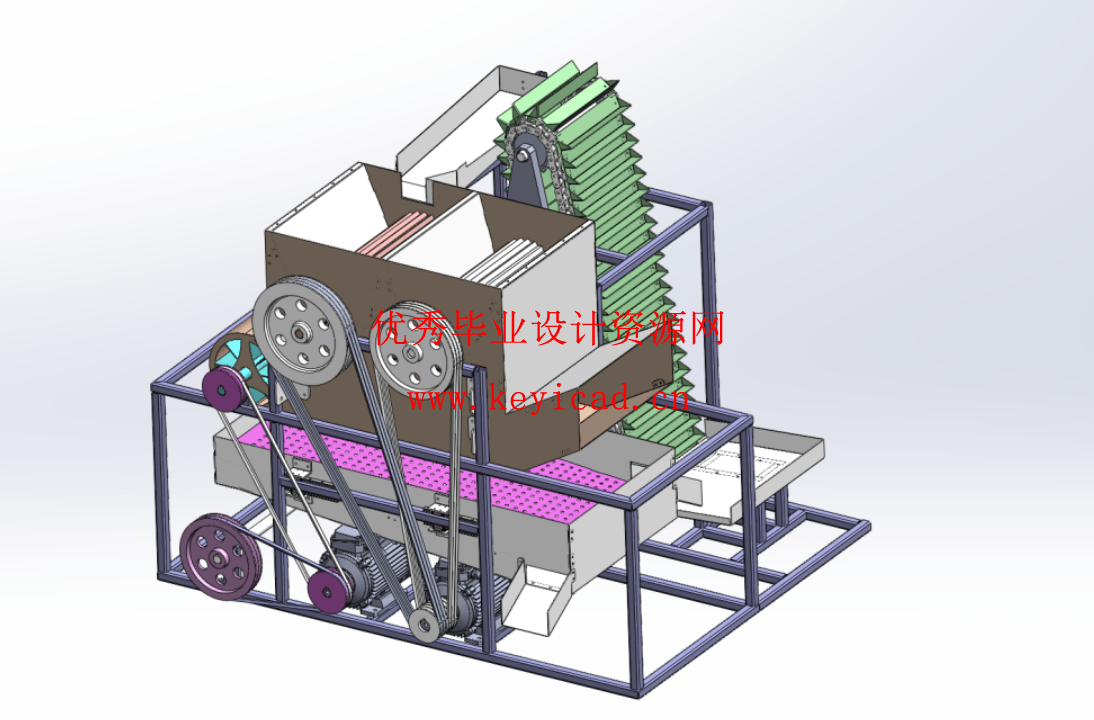
这是一款集成化的全自动花生脱壳设备,集上料、脱壳、筛选与输送功能于一体,可实现从原料到净仁的连续化作业。 设备主体由储料仓、双辊脱壳机构、振动筛选装置和链式提升输送机构组成。储料仓采用倾斜式设计,能确保花生均匀进料;双辊脱壳机构通过带槽橡胶辊的相向旋转,对花生进行柔性挤压与搓碾,在高效脱壳的同时最大程度减少果仁破损。脱壳后的物料进入下方的振动筛选装置,利用筛网孔径差和高频振动,快速分离出果仁、碎壳与未脱壳的花生。 未脱壳的花生会通过右侧的链式提升机自动回送至储料仓进行二次脱壳,形成闭环作业,大幅提升了脱壳的整体效率…
摘要 在本次的设计中,选择设计一款负压吸附式的玻璃幕清洗机器人,通过查阅相关的设计文献,了解其结构原理,主要的任务是完成总体机构的构思和传动部件的布局,完成涮盘结构的设计,主要包括对涮盘结构尺寸的确定绘制、涮盘电机的布局和安装位置的确定、涮盘固定部件确定、涮盘电机轴的计算校核等;机箱结构的三维建模,确定安装孔位及其他部件的结构;齿轮传动结构的三维建模和齿轮传动的设计计算;计算负压工作相关的参数,确定其结构尺寸及结构框架,合理选择电机,选则合适的材料,降低机器人的自身重量,绘制总体结构总图,完成各关键零件的结构设计图…



