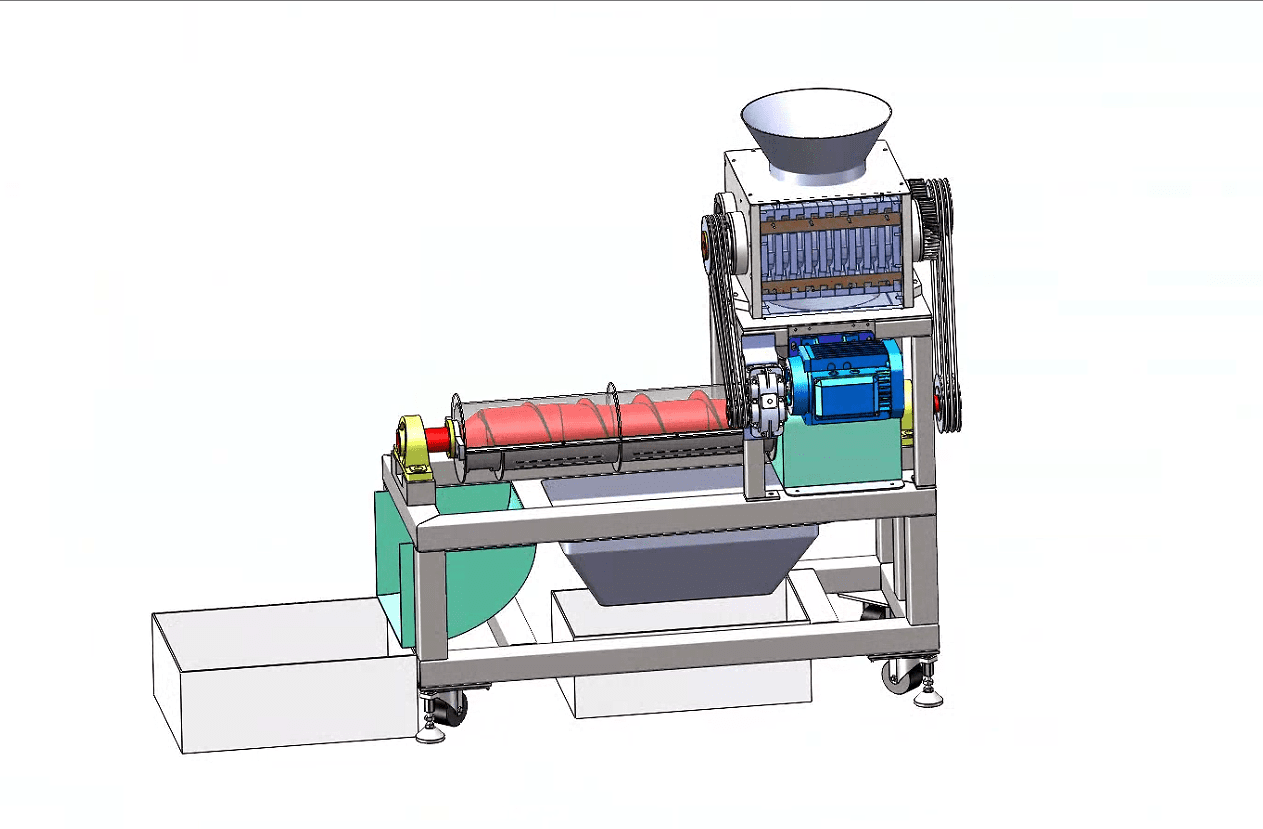
摘要 本研究针对厨余垃圾处理难题,设计了一种高效、环保的厨余垃圾粉碎机。通过双轴对向旋转粉碎和螺旋挤压输送技术,实现对厨余垃圾的有效粉碎和固液分离,显著减少垃圾体积和重量,提高处理效率。设备结构包括粉碎装置、挤出出料装置、传动系统及辅助装置,通过合理设计确保高效粉碎和低噪音运行。通过有限元分析验证了关键零件的强度,确保设备运行的可靠性和稳定性。本研究设计的厨余垃圾粉碎机不仅能有效解决厨余垃圾处理难题,还能促进资源循环利用,减少环境污染,具有广泛的应用前景。 关键词:厨余垃圾;粉碎机;挤出装置 目录 1 绪论 11.…
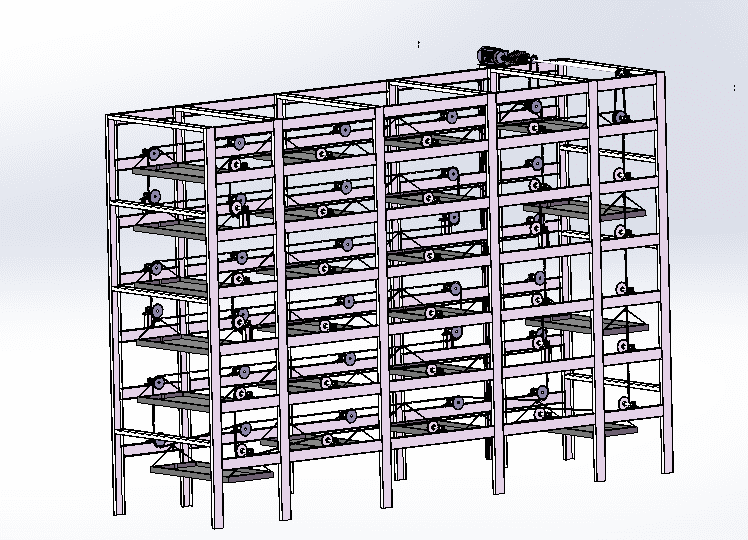
摘要 随着现代养蚕业对自动化技术需求的不断增长,本文提出并详细阐述了一种创新的多层蚕台循环机结构设计方案。这项研究旨在通过提高作业效率和降低人工成本来解决传统养蚕过程中存在的效率低下问题。文章首先介绍了研究的背景及其在现代农业机械自动化领域中的重要意义,继而深入分析了多层蚕台循环机的国内外研究现状,为后续的研究提供了坚实的理论基础。然后明确了多层蚕台循环机总体设计的目标任务,并描述了其工作流程、机构组成以及总体装配方案。这些工作为设备的设计过程奠定了坚实的基础,并确保了设计方案的可行性与实用性。着重于多层蚕台循环机…
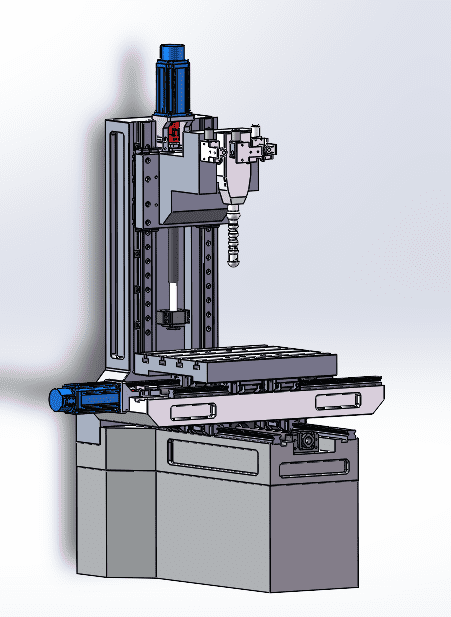
摘要 电火花成型机床是一种利用脉冲直流电源产生火花放电来去除工件材料的加工设备,具有独特的加工原理。其发展历程历经了多个阶段,而加工过程中需使用绝缘液体介质来创造放电通道,确保加工精度和稳定性。其加工特点使其在众多工业领域中占据重要地位。经过深入分析,设计了一款弯孔电火花成型机床的结构系统,它采用单柱立式的设计,主轴的升降是通过步进电机驱动滚珠丝杆来实现的。利用步进电机的多级可变细分技术,对伺服系统进行了变频和变步距的双重调节,从而显著提升了系统的跟踪精度和稳定性。同时,进给系统的设计也非常出色,它结合了滚珠丝杆和…
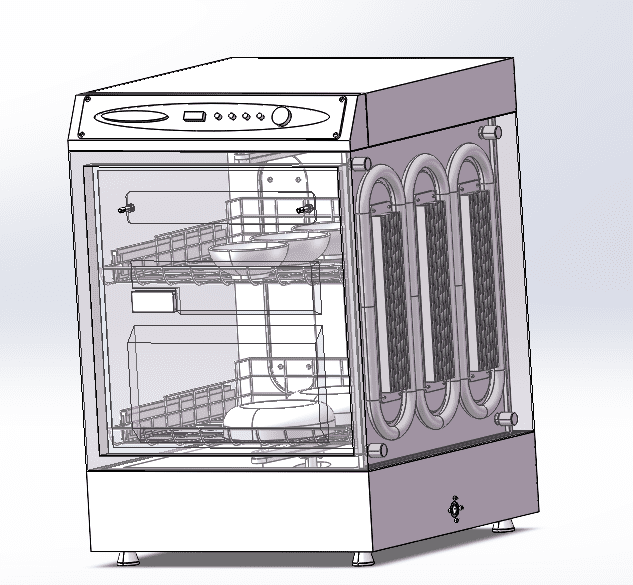
摘要 超声波技术在洗碗机领域的应用,使洗碗机的发展更加多元。在洗碗机整体结构、清洗工艺和控制系统三个方面进行改良设计。结构方面,采用不锈钢清洗槽,合理布置超声波系统,喷臂冲水装置和进排水装置等,使结构更加紧凑合理,提升清洗效果。清洗工艺方面,分析洗涤槽内超声波空化强度的分布,选择合适的参数,确定最优的清洗流程。 关键词:超声波;洗碗机;结构设计; 目录 摘 要 IAbstract II 第1章 绪论 11.1 课题研究背景 11.2 研究现状及发展趋势 21.3 研究内容及意义 2第2章 总体设计 42.1 方案的…
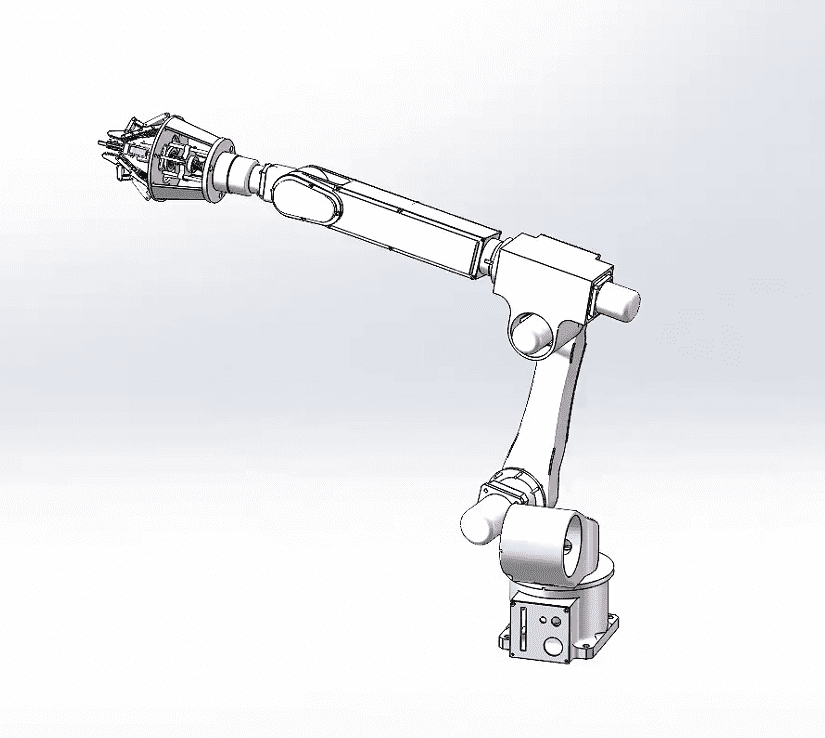
摘要 本研究设计了一款基于PLC的茄子采摘机械手,旨在提高茄子采摘的自动化水平。通过对茄子采摘机械手的总体方案设计、结构设计、运动学分析及应力分析、有限元仿真及优化以及PLC程序设计等方面的深入研究,本研究成功设计了一款高效、稳定的茄子采摘机械手。该机械手采用了先进的PLC控制技术,能够实现精确控制,提高了采摘效率,减少了人力成本。此外,本研究还通过有限元仿真及优化,对机械手的结构进行了优化,提高了机械手的承载能力和使用寿命。本研究设计的茄子采摘机械手具有较高的自动化水平和采摘效率,为农业生产自动化领域的发展做出了…
摘要 在机械加工领域中,数控机床的应用随着现代制造业的迅速发展日益普及。数控机床的加工质量深受其分度工作台设计的合理性和精度影响,此部分为机床的关键组件。在追求极致加工效率的情境下,传统分度工作台设计的局限性凸显,因而创新性的分度工作台设计研究显得至关重要。为满足现代制造业对高精度加工的需求,设计了一种革新性的定位销式分度方案,旨在提升操作效率与便利性。一种用于分度工作的定位与销售方案是本文的核心探讨。本文旨在实现高精度工作台分度与快速定位,此设计依托于定位销的精确配合。本文深入剖析了定位销式分度工作台的工作原理,…
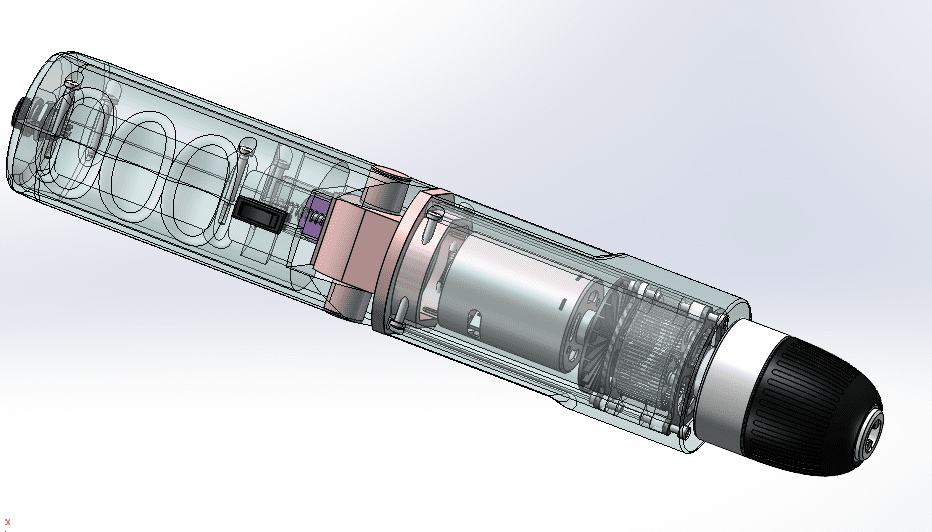
摘要 随着工业自动化的不断推进,智能电批作为一种重要的拧紧工具,其结构设计显得尤为重要。本文将对智能电批的整体方案设计、驱动电机选择、可折叠手柄、直筒式手柄、手枪式手柄以及二级行星减速机设计与校核进行简要介绍。智能电批的整体设计以高效、精确、便携为目标。通过集成高精度传感器、智能控制算法和用户友好型操作界面,实现拧紧力矩的实时监测与智能调整。整体结构紧凑,操作简便,能够适应各种复杂环境下的拧紧作业。驱动电机是智能电批的核心部件,直接关系到其性能表现。经过对比分析,最终选择了高性能的无刷直流电机。该电机具有响应速度快…
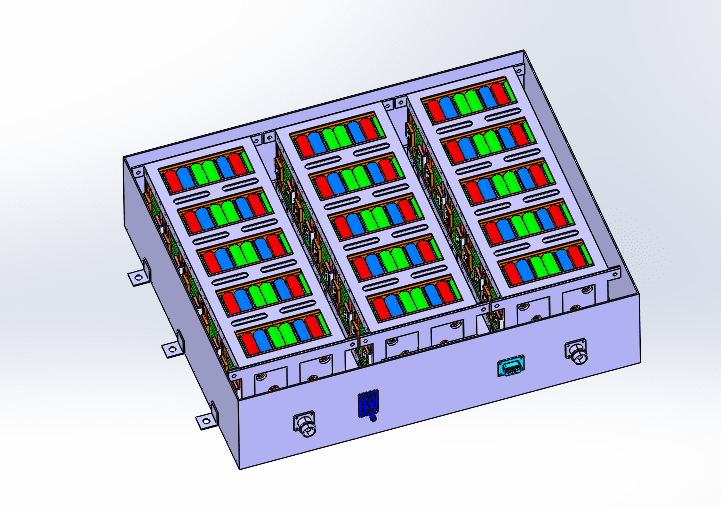
摘要 电动汽车高速发展的今天,动力电池系统作为其发展的关键和瓶颈,技术研发上也不断地取得突破。正是因为动力电池的重要地位,其结构设计上关系到整体系统的各项性能特点和安全要求,进而影响到整车的综合表现。本文根据课题组内对设计车辆的整车要求以及对动力电池的参数要求,完成电动汽车动力电池箱的结构设计和相应的特性分析工作。首先,本文分析动力电池箱设计过程中必须满足的各项安全性要求,确定采用3750个NCR18650型锂离子电池单体,通过50并75串的结构形式构成动力电池箱的基本框架。电池箱系统整体电池容量达到设计要求的36…
摘要 随着轨道交通行业的迅猛发展,轨道零部件的清洁与维护变得日益重要。本设计旨在开发一套轨道零部件激光自动除胶系统,以解决传统清洗方法存在的效率低下、环境污染等问题。该系统采用激光清洗技术,通过高能激光束照射零部件表面,实现胶质的高效、无污染去除。本设计首先分析了激光清洗技术的原理及发展历程,并结合轨道零部件的清洗需求,提出了系统的总体设计方案。方案包括激光器的选择、光路设计、机械结构设计以及控制系统设计等多个方面,旨在确保系统的稳定性、高效性和易操作性。在关键零部件设计方面,本设计详细阐述了激光自动除胶机主体部分…
摘要 擀饺子皮机是一种常见的食品机械,用于自动制作饺子皮。其原理是通过机械装置将面团压制成薄而均匀的圆形面皮,用于制作饺子。这种机器能够有效提升饺子皮的生产效率和质量,减轻手工制作的劳动强度,适用于家庭或食品加工厂等场所。本课题旨在设计家用小型擀饺子皮机,主要任务是设计压制机的机械结构,包括传动部件和运动部件,并确定各种参数。首先需要确定压制机的总体框架,包括生产效率、生产目标和整体尺寸。接着进行压制机整体结构的设计,涵盖动力系统和运动部件,对主要部件进行结构设计、分析、计算和验证,最终完成设计图的绘制。压制机的传…


